Chapter 11 Motion Control Instructions
11-343
Output Update Timing
Timing for changing to TRUE
Timing for changing to FALSE
Done When the end positions are reached.
When Execute changes from TRUE to
FALSE after the instruction execution is
completed
Done changes to TRUE when the
instruction execution is completed after
Execute changes from TRUE to FALSE
during the instruction execution. One
cycle later, Done changes to FALSE.
Busy
Whhen Execute changes to TRUE.
When Done changes to TRUE
When Error changes to TRUE
When CommandAbort changes to
TRUE
Active
When axes start being controlled by the
insruction.
When Done changes to TRUE
When Error changes to TRUE
When CommandAbort changes to
TRUE
CommandAbort
When the instruction execution is
aborted by other motion instruction.
When Execute changes from TRUE to
FALSE
Error
When an error occurs in the instruction
execution or the input parameters for
the instruction are illegal.
When Execute changes from TRUE to
FALSE
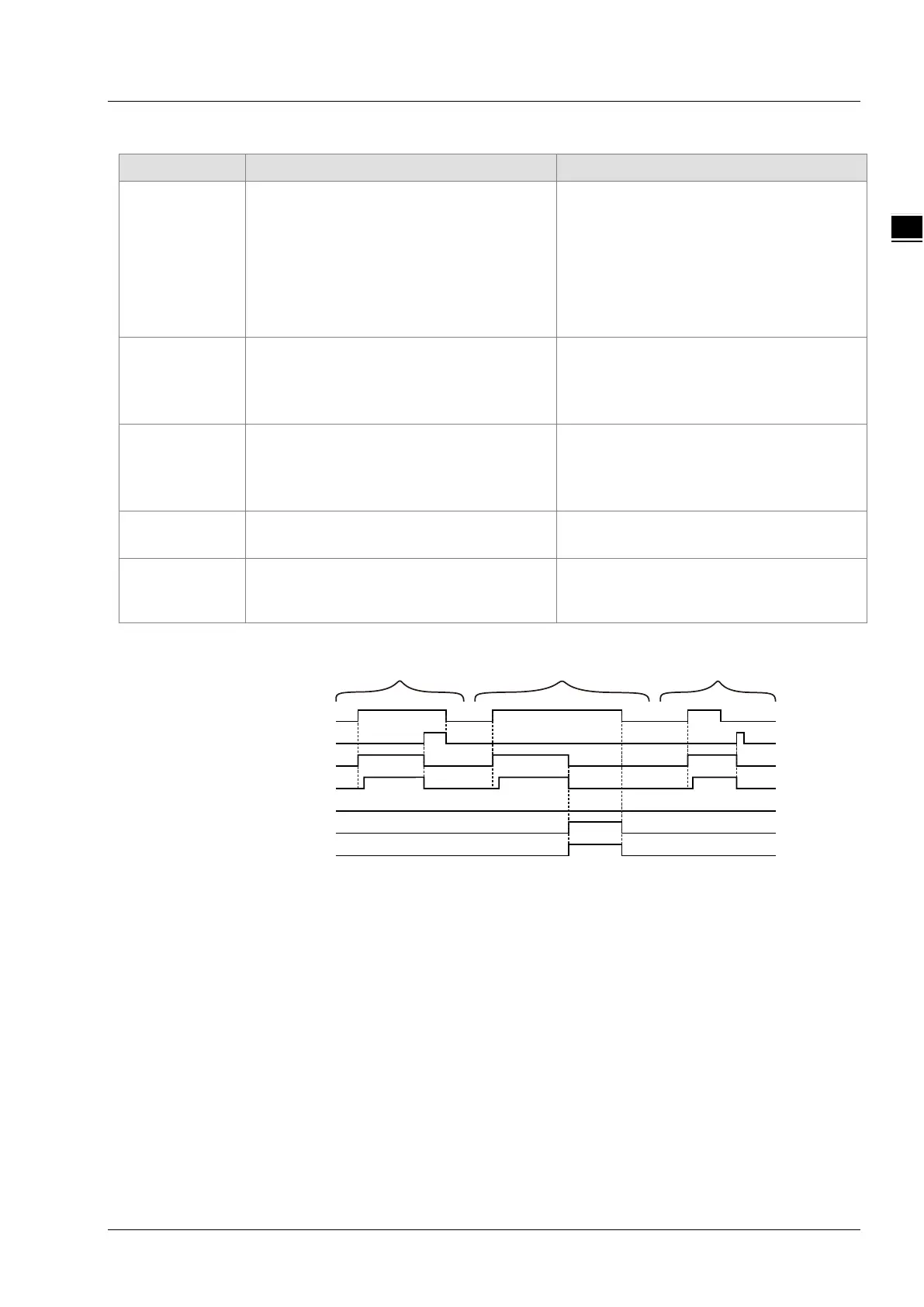
Output Update Timing Chart
Execute
Done
Busy
Active
CommandAbort
Error
Error ID
Case 1 Case 2 Case 3
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. Two cycles later, Active
changes to TRUE. When the axes group reaches the end position, Done changes to TRUE,
Busy and Active change to FALSE.
Case 2: When Execute changes from FALSE to TRUE and an error occurs (such as error in state
machine of the axes group), Error changes to TRUE and ErrorID shows corresponding error
codes and meanwhile Busy and Active change to FALSE. When Execute changes from TRUE
to FALSE, Error changes to FALSE.
Case 3: After Execute changes from TRUE to FALSE in the instruction execution, Done changes to
TRUE when the instruction execution is completed. Meantime Busy and Active change to
FALSE. One cycle later, Done changes to FALSE.
Function
1. DMC_ MoveLinearAbsolute is used for an axes group to conduct linear interpolation and one or more
axes in the axes group can be controlled. The firmware of V1.01 and above supports the function.

 Loading...
Loading...








