DVP-15MC Series Motion Controller Operation Manual
11-382
Center (I,J)
X
Y
Z
End point X,Y,Z ( )
Start
point
Helical
interpolation
( )X1,Y1,Z1
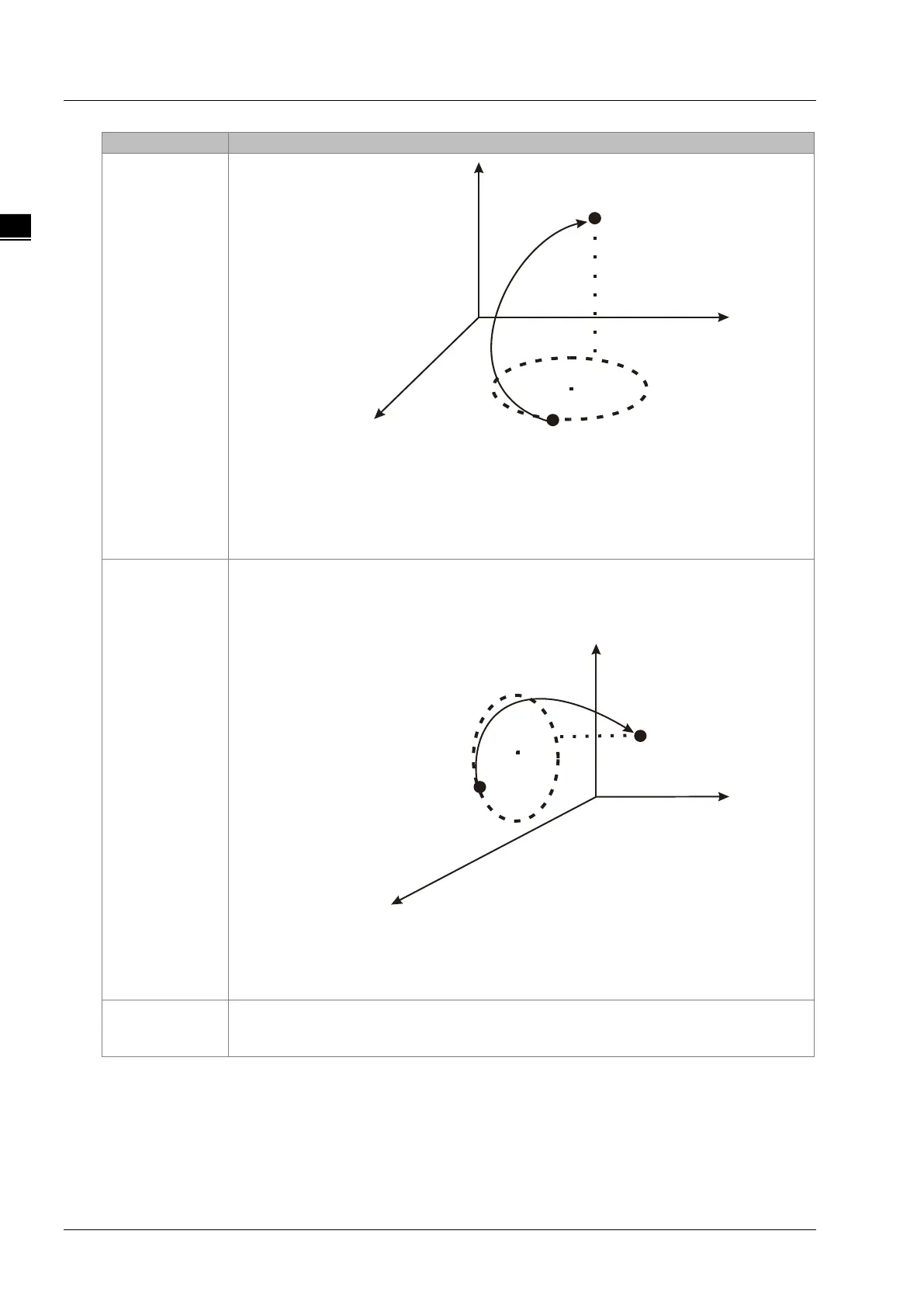
In the figure above,
Coordinates for the center: I=X1+AuxPoint[1], J=Y1+AuxPoint[2],
Coordinates for the end point:
X=X1+EndPoint[1], Y=Y1+EndPoint[2],Z=Z1+EndPoint[3].
1
Draw an arc via the center on ZX plane. AuxPoint[1] is the offset value of the
center on basis of the start point on X-aixs. AuxPoint[2] is the offset value of the
center on basis of the start point on Z-aixs.
Helical
interpolation
Center ( I,K)
Start point
End point
( )X,Y,Z
Z
X
Y
( )X1,Y1,Z1
Coordinates for the center: I=X1+AuxPoint[1],K=Z1+AuxPoint[2]。
Coordinates for the end point:
X=X1+EndPoint[1], Y=Y1+EndPoint[2], Z=Z1+EndPoint[3].
2
Draw an arc via the center on YZ plane. AuxPoint[1] is the offset value of the
center on basis of the start point on Y-aixs. AuxPoint[2] is the offset value of the
center on basis of the start point on Z-aixs.

 Loading...
Loading...








