DVP-15MC Series Motion Controller Operation Manual
11-384
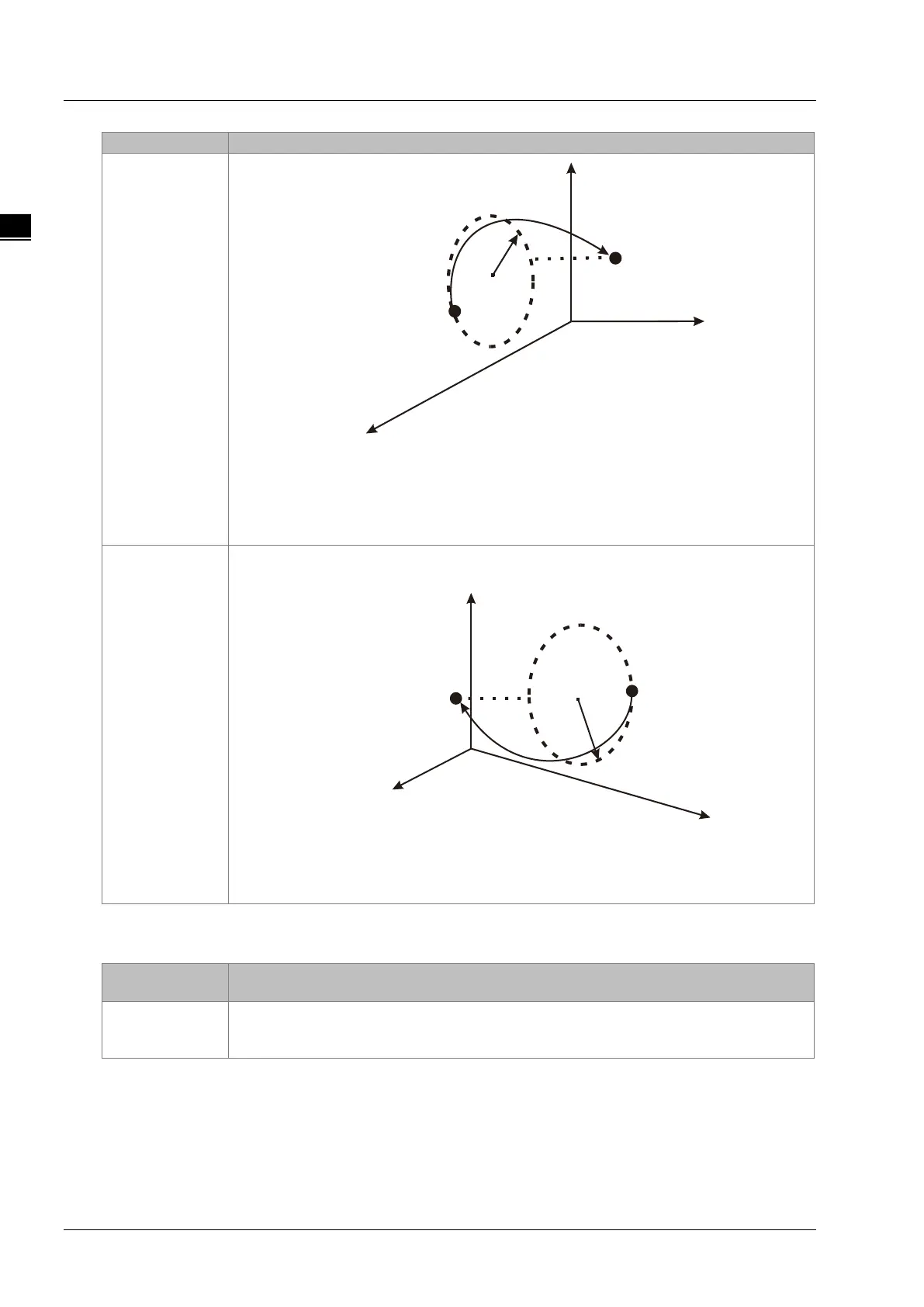
Helical
interpolation
Start point
End point X,Y,Z ( )
Z
X
Y
R
a
d
i
u
s
R
:
( )X1,Y1,Z1
In the figure above, Radius: R=AuxPoint[1]。
Coordinates for end point: X=X1+EndPoint[1],Y=Y1+EndPoint[2],
Z=Z1+EndPoint[3]。
5
Draw an arc via the radius on ZY plane. The value of AuxPoint[1] is the radius of
the circle on ZY plane and here the value of AuxPoint[2] is meaningless.
Start point
End point
( )X,Y,Z
Z
X
Y
R
a
d
i
u
s
R
:
Helical interpolation
( )X1,Y1,Z1
In the figure above, Radius: R=AuxPoint[1]
Coordinates for end point: X=X1+EndPoint[1], Y=Y1+EndPoint[2],
PathChoice
The parameter determines the direction for circular interpolation. See the details as follows.
value
Description
0
The axes group conducts circular interpolation in the clockwise direction on the
arcs of the specified plane. Take the radius method for example, the path for the
circular motion is shown as below.

 Loading...
Loading...








