16. NAVIGATION SENSORS
16-3
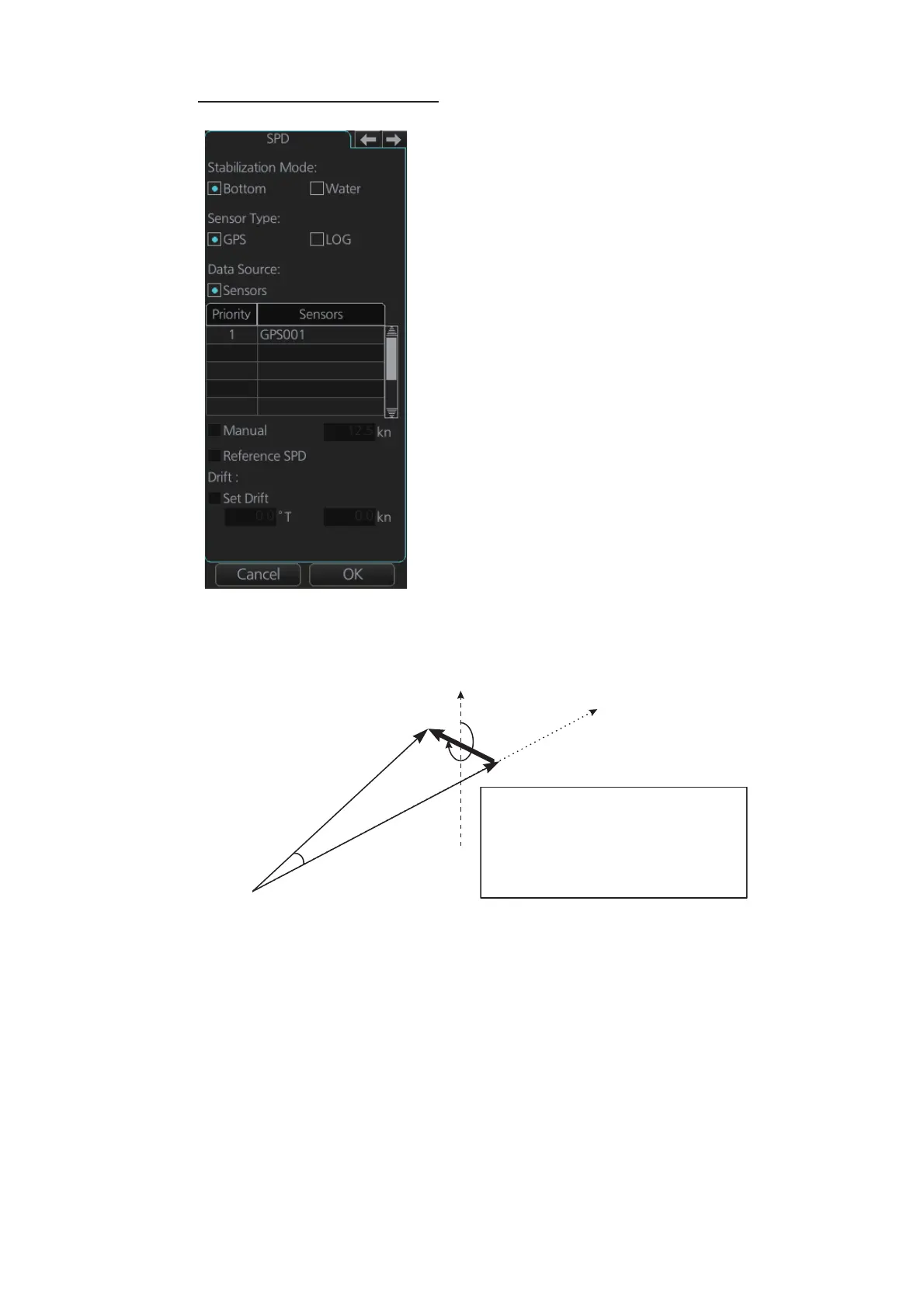
[SPD] page (System Sensor)
[Stabilization Mode]: Select the water stabilization
mode: Select [Bottom] for ground stabilization, or select
[Water] for sea stabilization.
[Sensor Type]: Select [GPS] in case of a GPS naviga-
tor, or [LOG] for speed log.
[Data Source]: Check [Sensors] to use a sensor in the
[Sensors] list, or click [Manual] to enter speed manually.
Use [Manual] when no speed source is available.
[Manual]: Input speed manually. Check [Water] in [Sta-
bilization Mode] and deactivate the AIS function to en-
able entry.
[Reference SPD]: Check to use radar as the source for
speed and course. (Only available with the Local Sen-
sor Setting and checking [Bottom] in [Stabilization
Mode].)
[Set Drift]: Check the [Set Drift] checkbox to manually
set speed and course of drift. Note that you can select
manual drift only if you check [Water] in [Stabilization
Mode].
Angle = Difference between heading and COG
Spd = Speed component of the drift vector
Cse = Course component of the drift vector
Vector defined by (SOG and COG) is equal to vector sum of vectors defined by (SPD
and HDG) and (set and drift).
HDG
spd
SOG
COG
cse
SPD: water speed
HDG heading of ship
SOG: speed over ground
COG: course over ground
spd: speed of drift
cse: course of drift
angle: difference between HDG and COG
North
SPD
angle
 Loading...
Loading...







