3. ECDIS Display
3-8
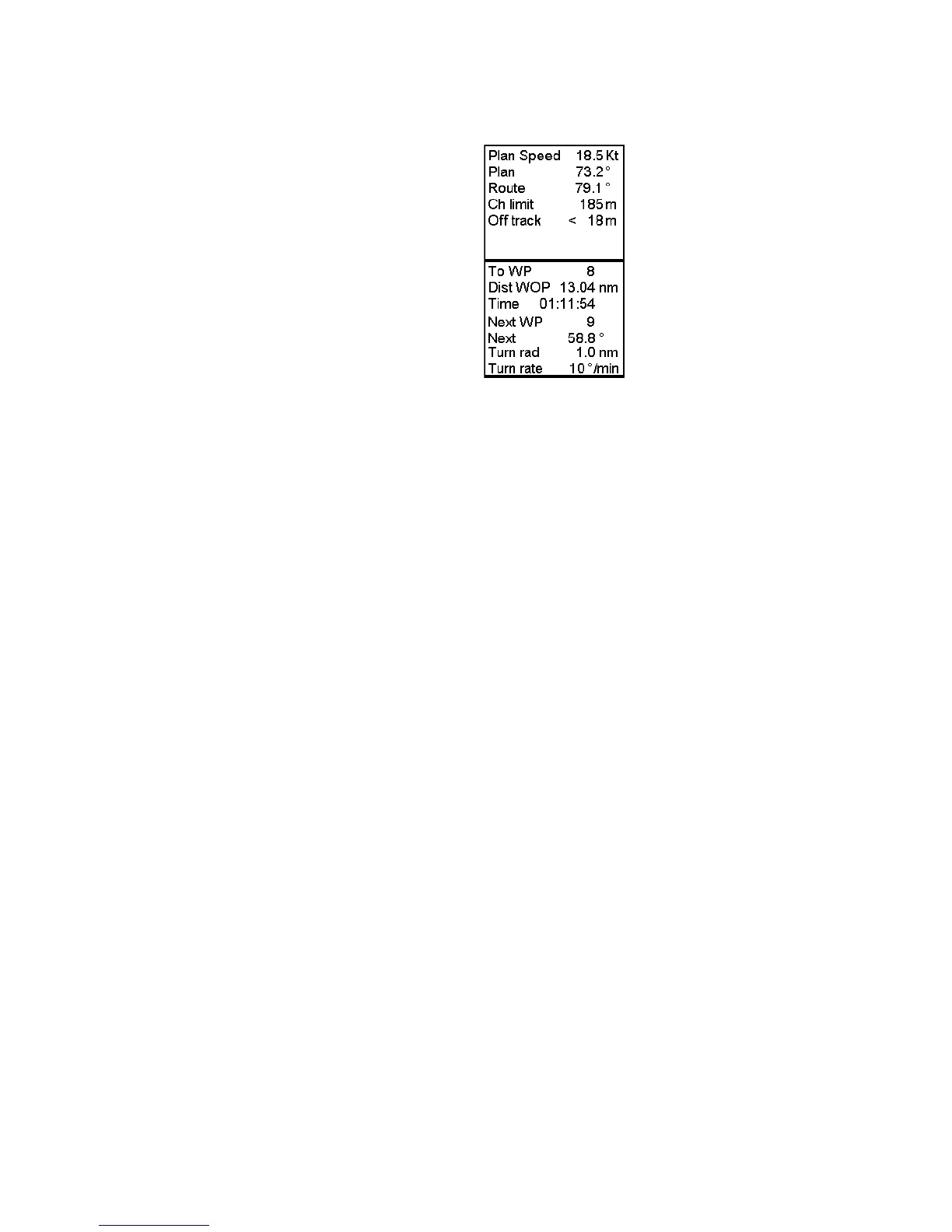
Information in route sidebar
The following information is shown in the route sidebar:
Information from route monitoring:
• Plan Speed: Planned speed to approach "To WP".
• Plan: Planned course between previous WP and "To
WP".
• Route: Calculated set course to follow the monitored
route, including off track, drift and gyro error
compensation.
• Ch limit: Planned width of channel to approach "To
WP".
• Off track: Perpendicular distance the ship is from the
intended track.
• To WP: The waypoint which the ship is approaching.
• Dist WOP (Wheel Over Point): Distance to the
point where rudder order for course change at "To
WP" will be given.
• Time: Time to go to WOP (dd:hh:mm:ss).
• Next WP: The WP following the "To WP".
• Next: Planned course between "To WP" and "Next
WP".
• Turn rad: Planned turning radius at "To WP".
• Turn rate: Calculated rate of turn which is based on
current speed and planned turning radius.
The following information is calculated from data of
positioning sensors and from route monitoring data:
• Route
• Off track
• Dist WOP
• Time
• Next
Additional textual information is available if any of the
following steering modes are in use.
For FURUNO Autopilot FAP-2000, see Chapter 28.
• "Goto WP", "Goto WP Great circle", "Ass. Appr
enabled" and "Ass. Turn enabled" and "Assisted
turn" in Goto Waypoint mode
• "Goto Track", "Track Great circle" and "Track
Appr. Enabled, "Track Turn Enabled" and Track
Turn" in Go Track mode
For the Autopilot PR-6000 the following steering
modes are available. For more information, see
Chapter 30.
• "Goto OS", "Goto OS Great circle", "Ass. Appr.
Enabled", "Ass. Turn enabled" and "Assisted turn"
in Goto OS mode
• "Goto AW", " GoAW Great circle", "GoAWAppr.
Enabled", "GoAW Turn Enabled" and"Goto AW
Turn" in Go Track mode
Permanent alarms are available in the following cases,
regardless of the steering mode used:
• "Outside channel" is indicated by displaying the
indication "Off track" in red and its value in
orange.
• "Out of gate" is colored orange. It indicates that if
the ship continues using the current course the
ship will be outside of the channel at wheel over
point.
• "Autopilot Conflict", available only with
Autopilot PT-500A.