28.7 Sample Processor
■■■■■■■■■■■■■■■■■■■■■■
274
■■■■■■■■
900 Touch Control
+
Counterclockwise rotation.
-
Clockwise rotation.
Swing rate
Rate at which the robotic arm is swung in the manual control.
Input range 10 to 55 °/s
Default value 55 °/s
28.7.3 External positions
Manual control: Sample Processor ▶ External position
NOTICE
This dialog is accessible only if you have a Swing Head with robotic arm
attached to the Sample Processor.
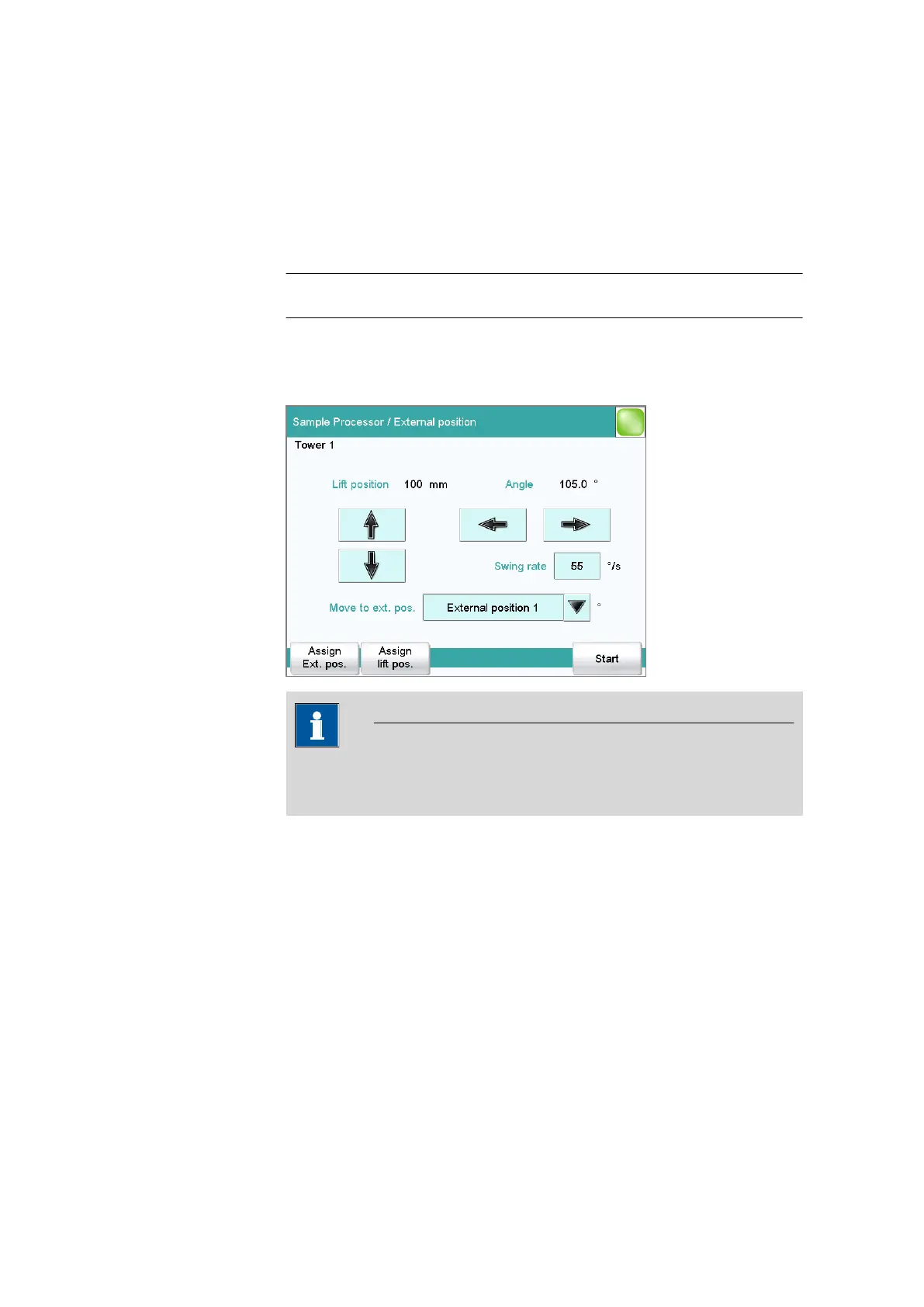
In the dialog Sample Processor / External position, you can swivel the
robotic arm to an external position outside of the sample rack. As with the
rack positions, here you can also define up to four frequently used exter-
nal positions as specific positions. You can assign specific lift positions to
these positions, analogous to the rack positions.
External positions are required if you have, for example, a measuring ves-
sel or a titration cell mounted in addition to the rack.
Lift position
Current lift position.
Angle
Current angle position of the robotic arm.