Setting Up Performance Curves
3-13
3
Motion 4000
Profile Parameters
Typical initial values to begin adjusting toward contract speed running are listed in the table
below. Hoistway speed and position related information may be reviewed using a controller F5
switch-accessed menu. Please refer to “MPI Diagnostic Menu” on page 4-66.
• Start jerk - defines rate of transition from zero speed to full acceleration. As Start Jerk
increases, the profile transitions more quickly from starting to maximum acceleration.
• Acceleration - determines the maximum acceleration for the profile.
• Roll jerk - Roll Jerk determines the rate that the profile transitions from maximum to
zero acceleration and zero to maximum deceleration. As Roll Jerk increases, the profile
transitions more quickly. Lower values provide greater comfort but are harder to fit into
the shortest one-floor-runs.
• High speed - determines the maximum speed for the Standard curve, usually the same as
contract speed (ft/min).
• Contract speed - the rated speed for the car.
• Inspection speed - determines the speed at which the elevator will run when the Manual
curve is being used.
• Deceleration - determines the maximum deceleration for this profile.
• Stop jerk - defines the transition from deceleration to Leveling Speed. As Stop Jerk
increases, the profile transitions more quickly from Deceleration to Leveling Speed.
• Leveling speed - determines the Speed at which the elevator will level into the floor.
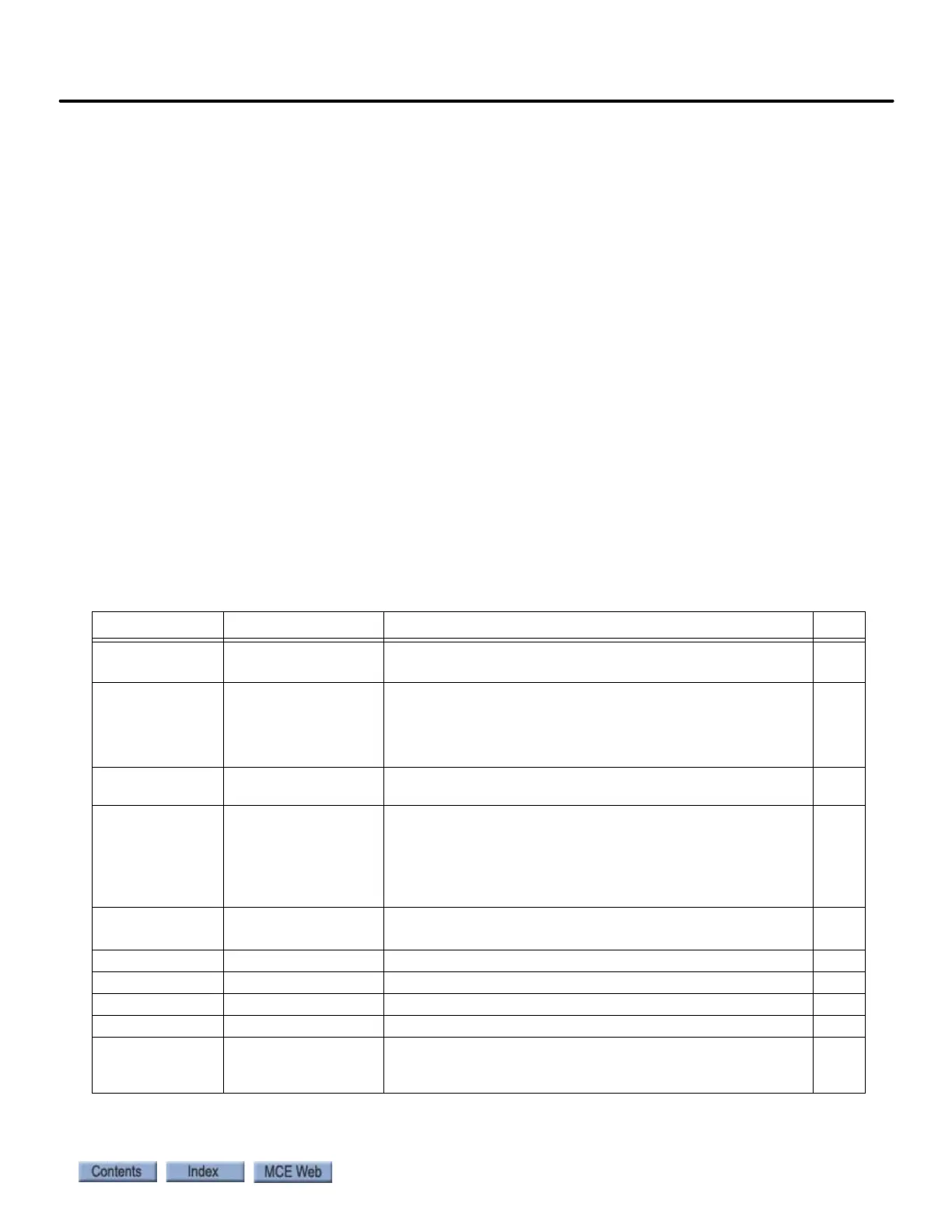
Table 3.2 Controller F7 Menu
Curve Aspect F7 Parameter Initial Setting Unit
Start Jerk 165, 170, 175, and
179 (each per curve)
From 4.0 to 8.0 ft/s
3
(1.219 to 4.438 m/s
3
. Higher value
results in a sharper start.
ft/s
3
Acceleration 168, 173, and 182
(each per curve)
Maximum value is typically 4.0 ft/s
2
(1.219 m/s
2
) and the
minimum is usually not less than 2.5 ft/s
2
(0.762 m/s
2
).
Values higher than 4.0 ft/s
2
(1.219 m/s
2
) are possible but
do not yield significant improvements in performance.
ft/s
2
Roll jerk 166, 171, 176, and
180 (each per curve)
Set by software.
ft/s
3
Deceleration 169, 174, 178, and
183 (each per curve)
Maximum value is typically 4.0 ft/s
2
and the minimum is
usually not less than 2.0 ft/s
2
with more common values
ranging from 2.75 ft/s
2
to 3.75 ft/s
2
(0.838 to 1.143 m/s
2
).
The value of Deceleration is usually slightly less than the
value of Acceleration (by 0.25 to 0.5)
ft/s
2
Stop jerk 167, 172, 177, and
181 (each per curve)
From 4.0 to 8.0 ft/s
3
(1.219 to 4.438 m/s
3
. Higher value
results in a sharper stop.
ft/s
3
High speed 150 Set to Contract Speed. ft/m
Inspection speed 155 As desired, up to 66% of contract speed or 125 ft/m ft/m
Leveling speed 158 2 to 5% of contract speed, 0 - 8 FPM. ft/m
Contract speed 149 Contract speed ft/m
Profile Scale 141 Initially set to 50%. After making some adjusting runs, this
can be gradually be increased to 100% to attain contract
speed.
%