Installation
2-36 Manual # 42-02-2P24
Magnetek AC Drive Parameters
With the exception of those parameters listed earlier (Magnetek Motor/Encoder Setup Over-
view on page 2-26), all Magnetek parameters should be left at default values.
Before changing any A5 Motor Menu parameters, make sure the A5 Motor ID parameter is set.
Setting Motor ID loads nominal values into select parameters in the A5 menu.
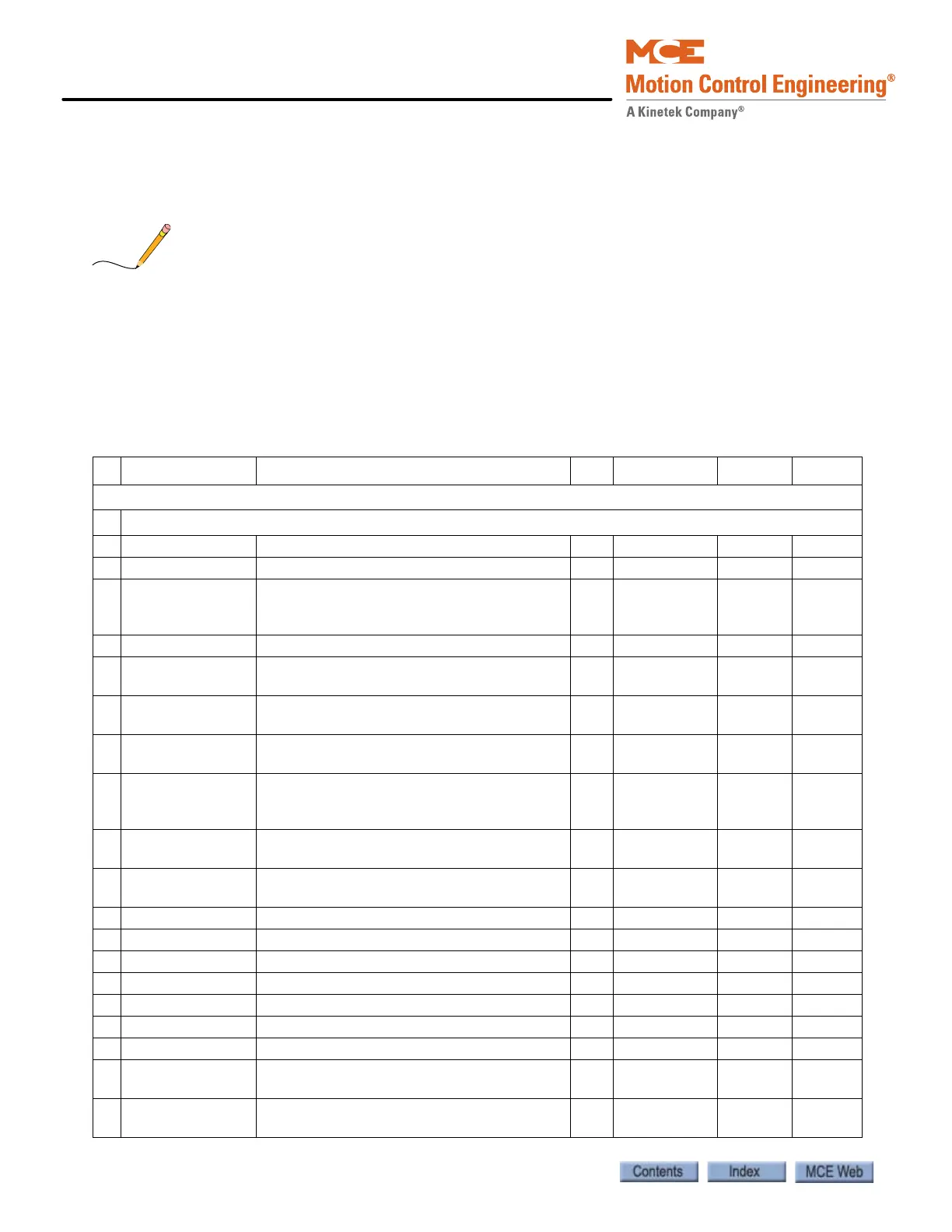
The following drive parameter table is included for your convenience and in the event the table
shipped with the controller is not available. In any case, you should use the table to verify all
settings on the elevator drive.
Table 2.5 Magnetek AC Drive Table
# Display Parameter Description Unit Range Defaults Factory
Adjust A0
A1 Drive
Contract Car Spd Elevator Contract Speed fpm 0 - 1500 400
Contract Mtr Spd Motor Speed at elevator contract speed rpm 50 - 3000 1130
Response Speed regulator sensitivity. If set too high,
motor current and speed will be jittery. If too
small, the motor will be sluggish.
rad/
sec
1.0 - 20.0 10 10
Inertia System inertia sec 0.25 - 50.00 2.0 2.0
Inner Loop Xover Inner speed loop crossover frequency (only
with Ereg speed regulator)
rad/
sec
0.1 - 20.0 2.0 2.0
Gain Reduce Mult Speed regulator response percentage to use in
low gain Mode. 100% = no reduction.
% 10 - 100 100 100
Gain Chng Level Speed level to change to low gain mode
(only with internal gain switch)
% 0 - 100.0 100 100
Tach Rate Gain Compensates for rope resonance. Use only
after A1, Inertia, and A1, Response, have
been set correctly.
%0 - 30.0 0 0
Spd Phase Margin Phase margin of speed regulator
(only with PI speed regulator)
o 45 - 90 80 80
Ramped Stop Time Time to ramp from rated torque to zero (only
with torque ramp down stop function)
sec 0 - 2.50 0.20 0.20
Contact Flt Time Time before a contactor fault is declared sec 0.10 - 5.00 0.50 0.80
Brake Pick Time Time before a brake pick fault is declared sec 0 - 5.00 1.00 0.0
Brake Hold Time Time before a brake hold fault is declared sec 0 - 5.00 0.20 0.20
Overspeed Level Threshold for detection of overspeed fault % 100.0 - 150.0 115.0 115.0
Overspeed Time Time before an overspeed fault is declared sec 0 - 9.99 1.00 1.00
Overspeed Mult Multiplier for overspeed test (U4) % 100 - 150 125 125
Encoder Pulses Encoder counts per revolution ppr 600 - 10000 1024
Spd Dev Lo Level Range around the speed reference for speed
deviation low logic output
% 00.1 - 10.0 10 10
Spd Dev Time Time before speed deviation low logic output
is true
sec 0 - 9.99 0.5 0.5