Installation
2-46 Manual # 42-02-2P24
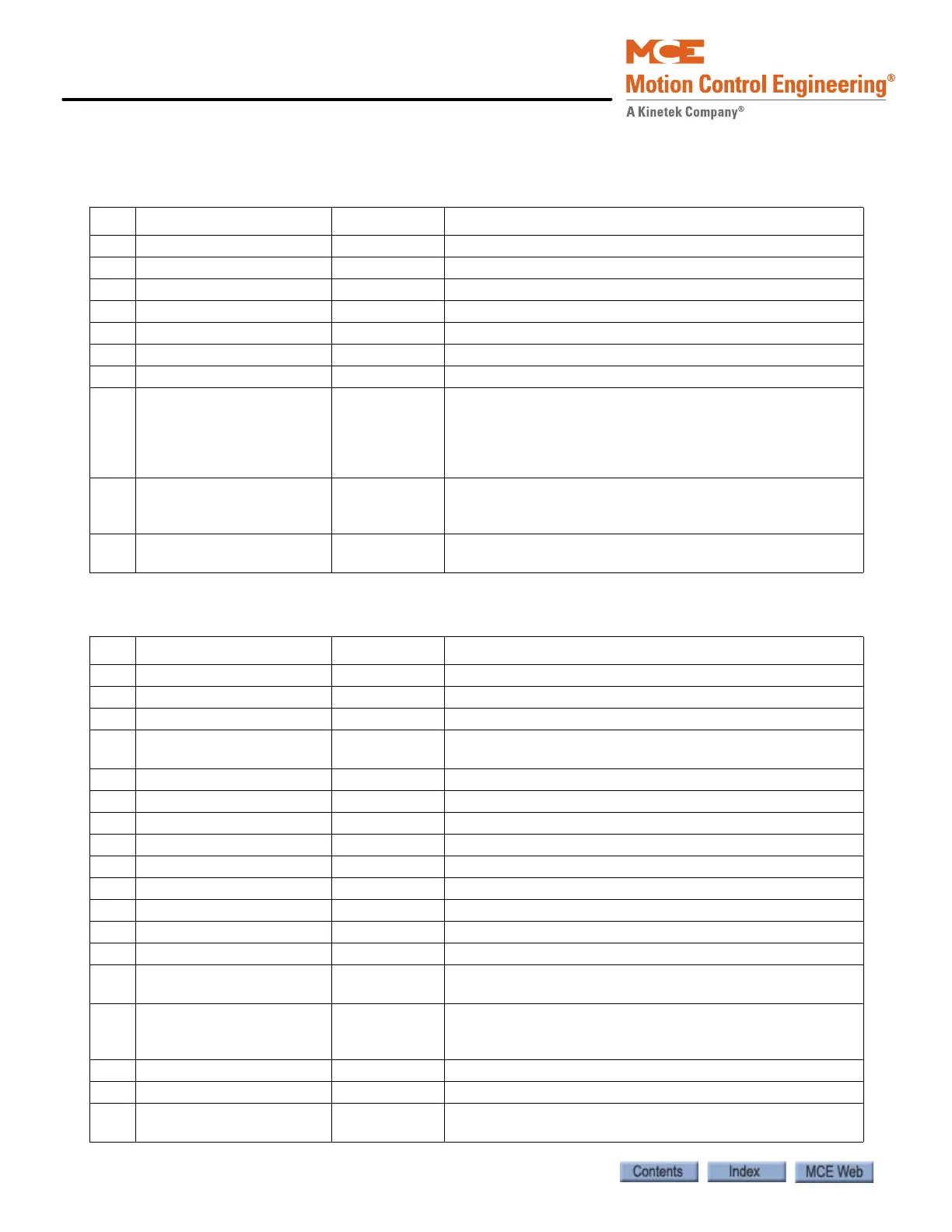
Controller Motion Parameters
The following F7 parameters must be checked before you attempt to move the car.
Table 2.6 F7 Menu Settings KEB/TorqMAX
# Item Default Recommended
148 Hoist motor speed +1165.0 rpm Per Job
155 Inspection speed (normal) +50 fpm As desired
170 Manual start jerk +1.00 ft/s3 +1.00 ft/s3
171 Manual roll jerk +1.00 ft/s3 +1.00 ft/s3
172 Manual stop jerk +1.00 ft/s3 +1.00 ft/s3
173 Manual acceleration +0.50 ft/s2 +0.50 ft/s2
174 Manual deceleration +0.50 ft/s2 +0.50 ft/s2
184 Drive type option KEB F5-GRD50
KEB LF.80 = View LF.80
LF.80 = 1.71 or greater: F5-GRD50 (geared) or
F5-GLS50 (gearless)
LF.80 = Other: F5-GRD49 (geared) or
F5-GLS49 (gearless)
185 Brake type option DISCRETE
If the controller has a brake module(s): One Module or
Two Mod ule s
If the controller has no brake module: Discrete
194 Normal brake pick voltage
Brake Module: Enter pick voltage
No Brake Module: No effect
Table 2.7 F7 Menu Settings Magnetek
# Item Default Recommended
133 Brake Pick Delay 0 ms Job specific. Initially set to 0.0
134 Speed Pick Delay +500 ms Job specific, Initially set to 1.0
138 Drive Disable Delay +1250 ms 1250
140 Profile Advance +100 ms
Drive tuning specific. Initially set to 1 divided by
Response. View response on A1 Magnetek drive menu.
142 Standard Slew Slope +0.5 ft/s2 Drive tuning specific. Initially set to 2.0
148 Hoist-motor speed +1165.0 rpm Per Job
155 Inspection speed (normal) +50 fpm As desired
160 Leveling Distance +1.0 in Drive tuning specific. Initially set to 2.0
170 Manual start jerk +1.00 ft/s3 +1.00 ft/s3
171 Manual roll jerk +1.00 ft/s3 +1.00 ft/s3
172 Manual stop jerk +1.00 ft/s3 +1.00 ft/s3
173 Manual acceleration +0.50 ft/s2 +0.50 ft/s2
174 Manual deceleration +0.50 ft/s2 +0.50 ft/s2
184 Drive type option KEB F5-GRD50
MAG HPV600 for 600/600PM
MAG HPV900 for 900/900PM/900II
185 Brake type option DISCRETE
If the controller has a brake module(s): One Module or
Two Mod ule s
If the controller has no brake module: Discrete
192 Speed Drop Delay Drive tuning specific. Initially set to 900
193 Profile Compensation Dynamic Fixed
194 Normal brake pick voltage
Brake Module: Enter pick voltage
No Brake Module: No effect