Installation
2-20 Manual # 42-02-2P24
TorqMax/KEB Drive Operation Overview
The LF.3 parameter determines the mode the drive is in. The drive default mode is “run.”
Generally:
•Set LF.3 to Stop to adjust parameter values
• Press Enter to save the adjusted value
•Set LF.3 to run and press Enter to run the elevator using the controller Inspection con-
trols or for normal operation
Drive Motor/Encoder Setup Overview
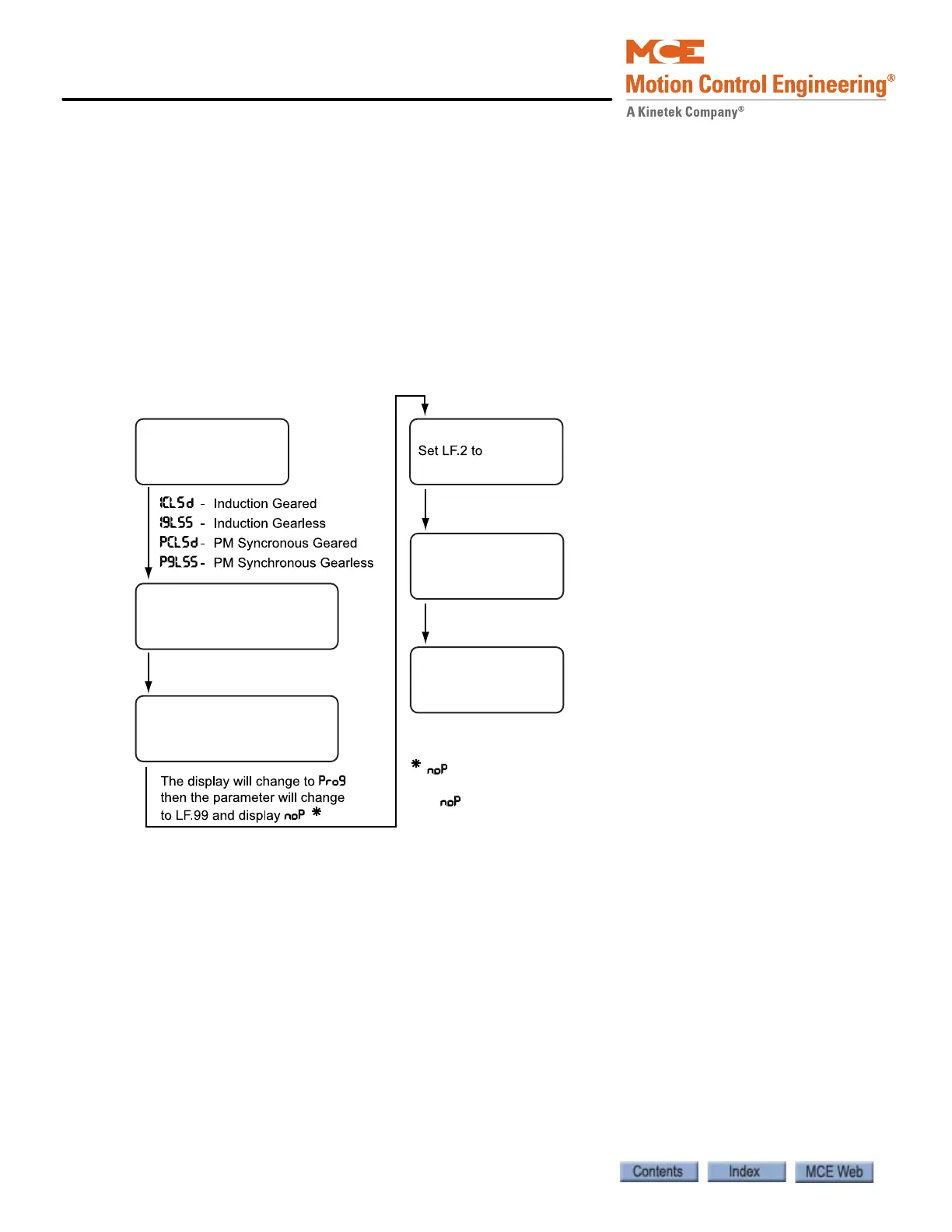
Figure 2.6 F5 Motor/Encoder Setup Overview
Check Correct Motor/Control The drive is set up at the factory to match your job
configuration. However, before anything else, check that read-only parameter LF.4 displays the
correct motor type:
• Induction geared/Closed Loop: ICLSd
• Induction gearless/Closed Loop: IgLSS
• PM Synchronous geared/Closed Loop: PCLSd
• PM Synchronous gearless/Closed Loop: PgLSS
Check Control Mode Drive parameter LF.02 determines control mode. Check that con-
trol mode is set to SerSP (Serial Speed Control).
Determine Motor Type
Enter motor data -
LF.20 ... LF.25
Go to US.10, press FUNCTION
until correct selection displayed
then press ENTER
Go to US.4, set the display
to LOAD, then press ENTER
Enter encoder data -
LF.26 ... LF.29
indicates successful load.
If does not appear,
refer to drive manual.
SErSP