5-118
5-9 Functions Relating to Protections, Warnings and Various Output Signals
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-Axxxx)
5
Functions
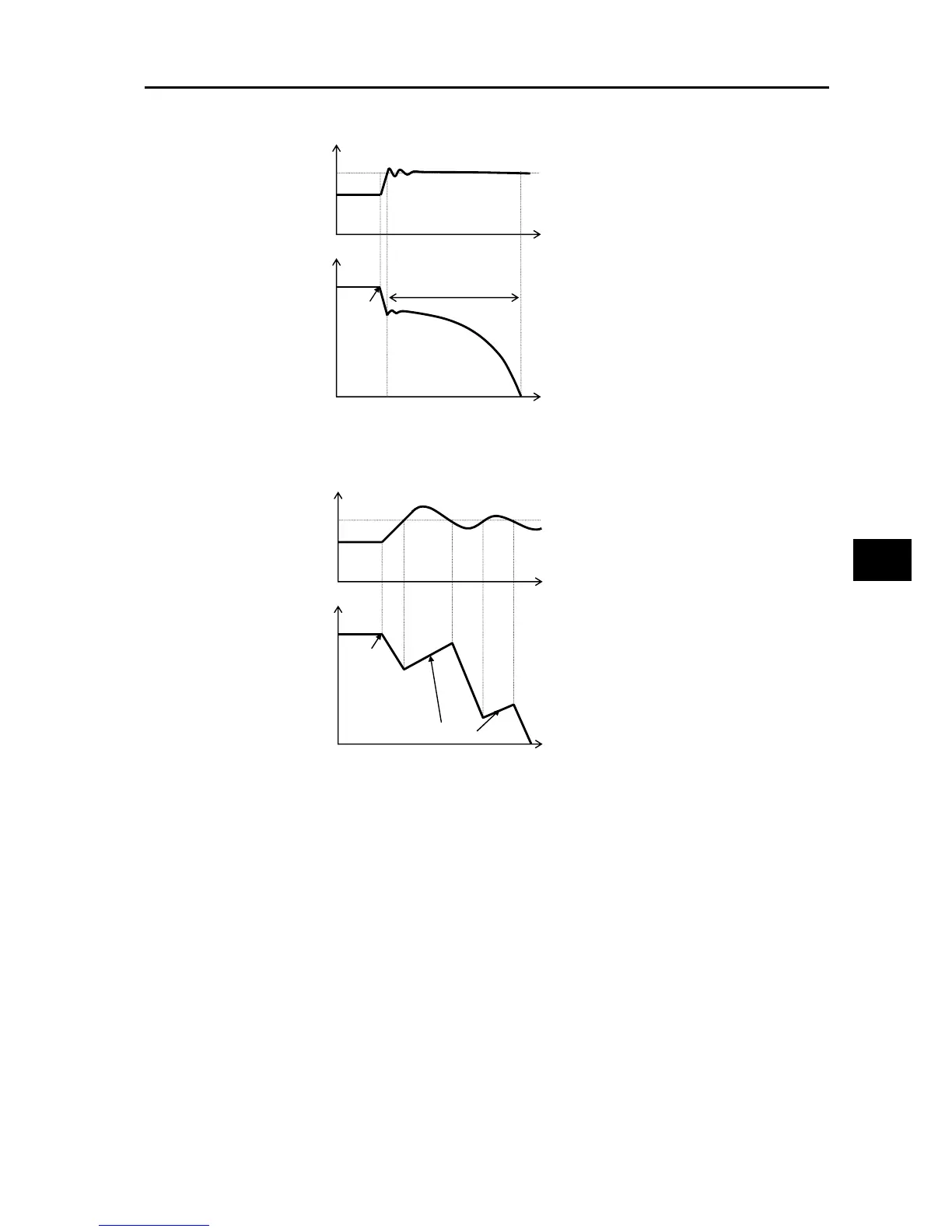
Example 1) DC voltage kept constant (b130 = 01)
Example 2) Acceleration enabled (b130 = 02)
With this function enabled, the actual deceleration time may be longer than the set value.
Particularly with b130 = 02, if b131 is set too low, the Inverter may not decelerate.
Even if this function is enabled, an overvoltage trip may occur depending on the deceleration rate
and load condition.
When using this function, the Inverter may reduce frequency depending on the moment of inertia
of motor load, and takes a long time to stop.
If the value set in b131 is lower than the incoming voltage or equivalent, the motor may not be
stopped.
When (b130 = 01), PI control works to keep the internal DC voltage constant.
Though quicker response is expected when the setting of Proportional Gain (b133) is increased,
if the setting is too large a trip will occur easily.Response also becomes quicker when the setting
of Integral Time (b134) is decreased, but if the setting is too small, a trip will occur easily, as well.
Main circuit DC voltage (V)
Overvoltage
Suppression Level
(b131)
Output frequency (Hz)
Start
deceleration
Constant control at DC voltage
Time (s)
Time (s)
Main circuit DC voltage (V)
Overvoltage
Suppression Level
(b131)
Output frequency (Hz)
Start
deceleration
Accelerates according to b132.
Time (s)
Time (s)