5-152
5-11 Sensorless Vector Control
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-Axxxx)
5
Functions
*1: This setting can be allocated only to C028.
Overtorque/Undertorque Selection (OTQ)
This function outputs a signal upon detection of the estimate motor output torque exceeding a
given level. This function is enabled only when Sensorless Vector Control is selected for
control method (A044/A244 = 03). Take note that under all other settings, the output becomes
indeterminable.
This function is enabled when the Overtorque/Undertorque (07: OTQ) is selected in Multi-
function Output Terminal Selection.
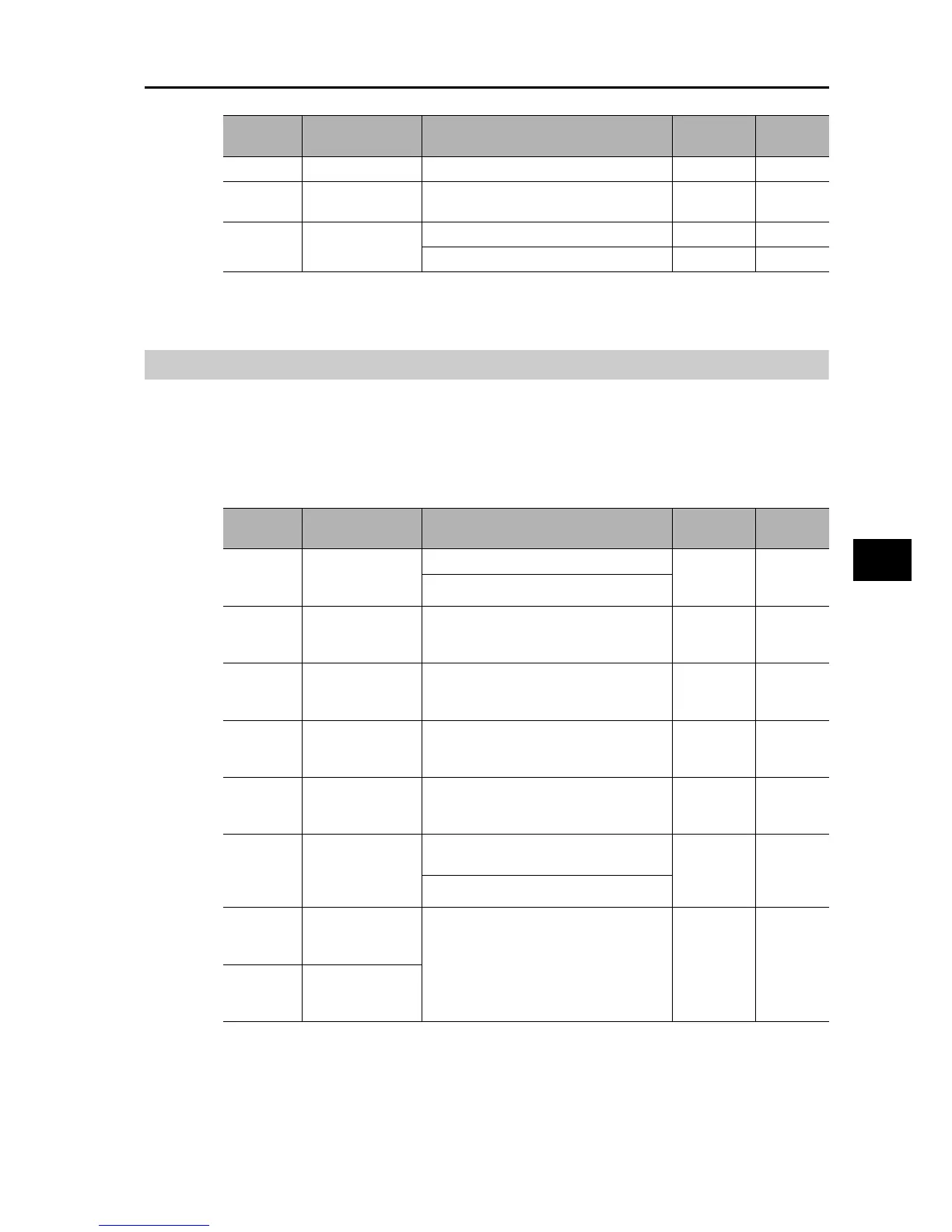
Parameter
No.
Function name Data
Default
setting
Unit
A044/A244
Control Method 1/2
03: Sensorless vector control 00 −
d012
Output Torque
Monitor
−200. to 200.
Output torque
−−
C027
C028
MP Selection
AM Selection
02: Output torque 07 −
11: Output torque (signed)
*1
07 −
Parameter
No.
Function name Data
Default
setting
Unit
C054
Overtorque/
Undertorque
Selection
00: Overtorque
00 −
01: Undertorque
C055
Overtorque Level
(Forward Power
Running)
0. to 200.
OTQ signal output level for forward power
running
100. %
C056
Overtorque Level
(Reverse
Regeneration)
0. to 200.
OTQ signal output level for reverse
regeneration
100. %
C057
Overtorque Level
(Reverse Power
Running)
0. to 200.
OTQ signal output level for reverse power
running
100. %
C058
Overtorque Level
(Forward
Regeneration)
0. to 200.
OTQ signal output level for forward
regeneration
100. %
C059
Overtorque/
Undertorque
Signal Output
Mode Selection
00: Enabled in acceleration/deceleration
and constant speed operation
01 −
01: Only during constant speed
C021 to
C022
Multi-function
Output Terminal
Selection
07: OTQ (Overtorque/Undertorque)
−−
C026
Multi-function
Relay Output
Function Selection