5-155
5-11 Sensorless Vector Control
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-Axxxx)
5
Functions
Torque Control
This function is enabled only when Sensorless Vector Control is selected for control method (A044/A244 = 03).
To operate in the torque control, allocate "52: ATR" to any multi-function input terminal. While
the ATR terminal is turned on, the torque reference input is enabled.
The torque reference source canbe seledted from two analog types, Digital Operator, etc.
using P033. When analog setting is used, the full-scale value is 200%. (When voltage is used,
10 V corresponds to 200%.)
The torque control speed depends on the balance between torque and load. To prevent the
Inverter from running out of control, set a speed limit value in P039 (forward) or P040 (reverse).
Increasing the speed/torque control switching time reduces the switching shock. The torque reference
value under this function assumes that the torque corresponding to the Inverter's rated current is
100%. Accordingly, the absolute value of torque varies depending on the motor to be combined.
Torque Bias Function
This function is used to apply a bias to the torque reference generated by torque control. This function
is enabled only when Sensorless Vector Control is selected for control method (A044/A244 = 03).
The torque bias value under this function assumes that the torque corresponding to the Inverter's rated
current is 100%. Accordingly, the absolute value of torque varies depending on the motor to be combined.
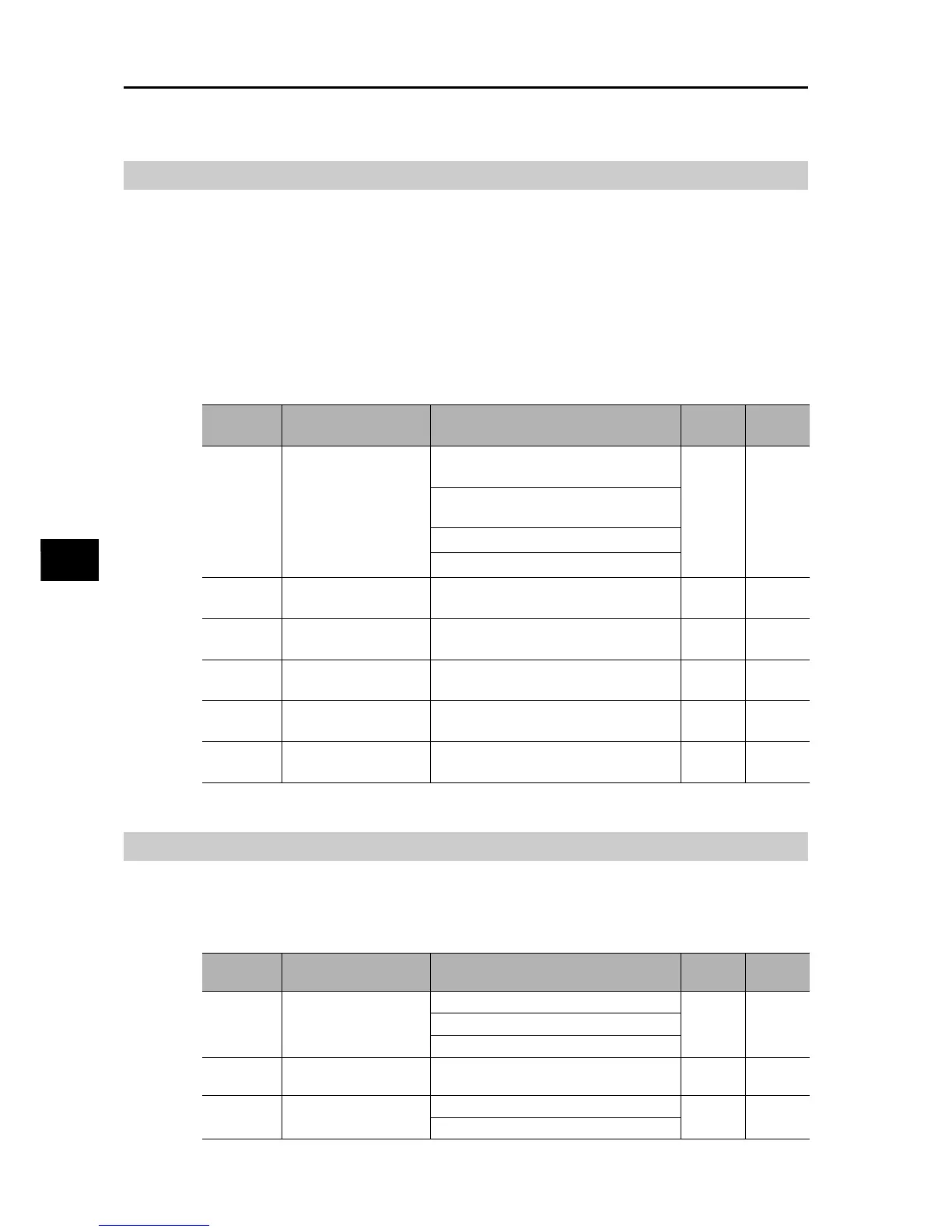
Parameter
No.
Function name Data
Default
setting
Unit
P033
Torque Reference Input
Selection
00: Input from the FV terminal
(10V = 200%)
00 −
01: Input from the FI terminal
(20 mA = 200%)
03: Input via the Digital Operator
06: Do not set.
P034
Torque Reference
Setting
0. to 200.
(Torque reference when P033 = 03)
0. %
P039
Speed Limit Value in
Torque Control (forward)
0.00 to 99.99/100.0 to 120.0
0.00 Hz
P040
Speed Limit Value in
Torque Control (reverse)
0.00 to 99.99/100.0 to 120.0
0.00 Hz
P041
Speed/Torque Control
Switching Time
0 to 1000
0. ms
C001 to
C008
Multi-function Input
Selection
52: ATR (Torque reference input
permission)
−−
Parameter
No.
Function name Data
Default
setting
Unit
P036 Torque Bias Mode
00: Disabled
00 −01: Set via the Digital Operator
05: Do not set.
P037 Torque Bias Value
−200 to +200
(Enabled when P036 = 01)
0. %
P038
Torque Bias Polarity
Selection
*1
00: As per sign
00 −
01: Depends on the RUN direction