5-151
5-11 Sensorless Vector Control
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-Axxxx)
5
Functions
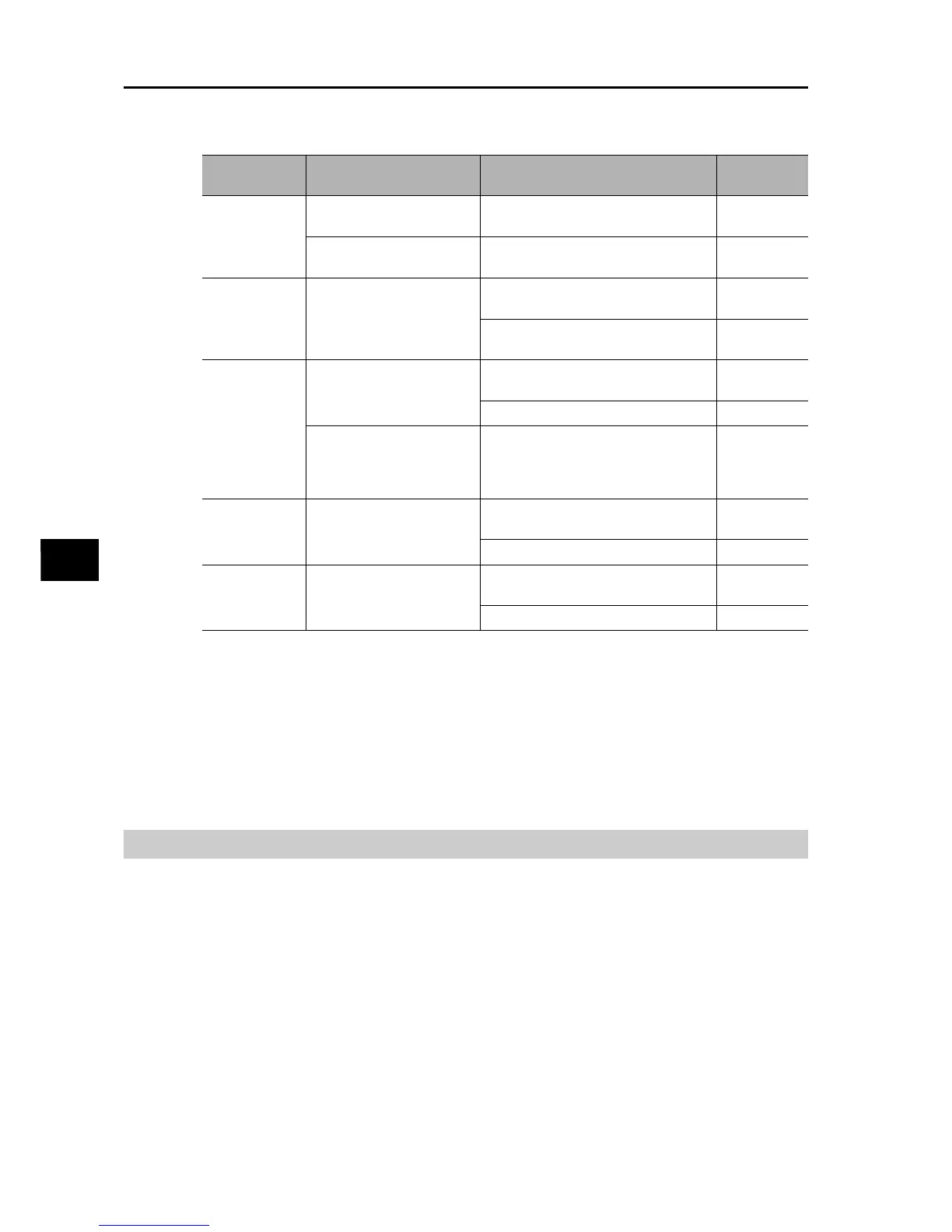
If sensorless vector control cannot provide the desired characteristics, adjust the motor
parameters depending on the phenomena, as shown in the table below.
Note: To use a motor with a capacity lower than that of the Inverter, set Torque Limit (b041 to b044) by
making sure the value α, calculated with the following formula, does not exceed 200%. Otherwise,
the motor may burn out.
α = Torque limit value × (Inverter capacity) / (Motor capacity)
Example) From the above formula, the torque limit value to achieve α = 200% with a 0.75 kW Inverter and
0.4 kW motor is calculated as follows:
Torque Limit (b041 to b044) = α × (Motor capacity) / (Inverter capacity)
= 200% × (0.4 kW) / (0.75 kW) = 106%.
Torque Monitor Function
This function monitors the estimate output torque of the motor.
This function is enabled only when Sensorless Vector Control is selected for control method
(A044/A244 = 03). Take note that if constant torque characteristics (VC), reduced torque
characteristics (VP 1.7th power) or free V/f setting is selected for Control Method (A044/A244),
this function is disabled and the output signals for display or through the control terminal block
become indeterminable.
To perform monitoring via the Digital Operator, select Display Parameter d012.
To perform monitoring using signals from the control terminal block, refer to "MP Terminal
(Pulse/PWM Output)" on page 5-42 or "AM Terminal (Analog Output)" on page 5-44.
The torque monitor value under this function assumes that the torque corresponding to the
Inverter's rated current is 100%.
Accordingly, the absolute value of torque varies depending on the motor to be combined.
Operation
status
Phenomenon Adjusting method
Adjustment
item
Power running
Speed change ratio is a
negative value.
Increase motor parameter R2
gradually up to the set parameter × 1.2.
H021/H221/
H031/H231
Speed change ratio is a
positive value.
Decrease motor parameter R2
gradually up to the set parameter × 0.8.
H021/H221/
H031/H231
Regeneration
Insufficient torque at low
frequency (several Hz)
Increase motor parameter R1
gradually up to the set parameter × 1.2.
H020/H220/
H030/H230
Increase motor parameter Io gradually
up to the set parameter × 1.2.
H023/H223/
H033/H233
During startup
Shock occurs during
startup.
Reduce motor parameter J from the set
parameter.
H024/H224/
H034/H234
Reduce the speed response. H005/H205
The motor momentarily
rotates in the direction
opposite the reference
rotation direction.
Set Reverse Rotation Prevention
Selection (b046) to "01: Enabled."
b046
During
deceleration
Motor hunting
Reduce motor parameter J from the set
parameter.
H024/H224/
H034/H234
Reduce the speed response. H005/H205
Low-frequency
operation
Rotation is not constant.
Increase motor parameter J from the
set parameter.
H024/H224/
H034/H234
Raise the speed response. H005/H205