Parker EME
Technical Characteristics
192-120100 N16 C3I10T10 - December 2010
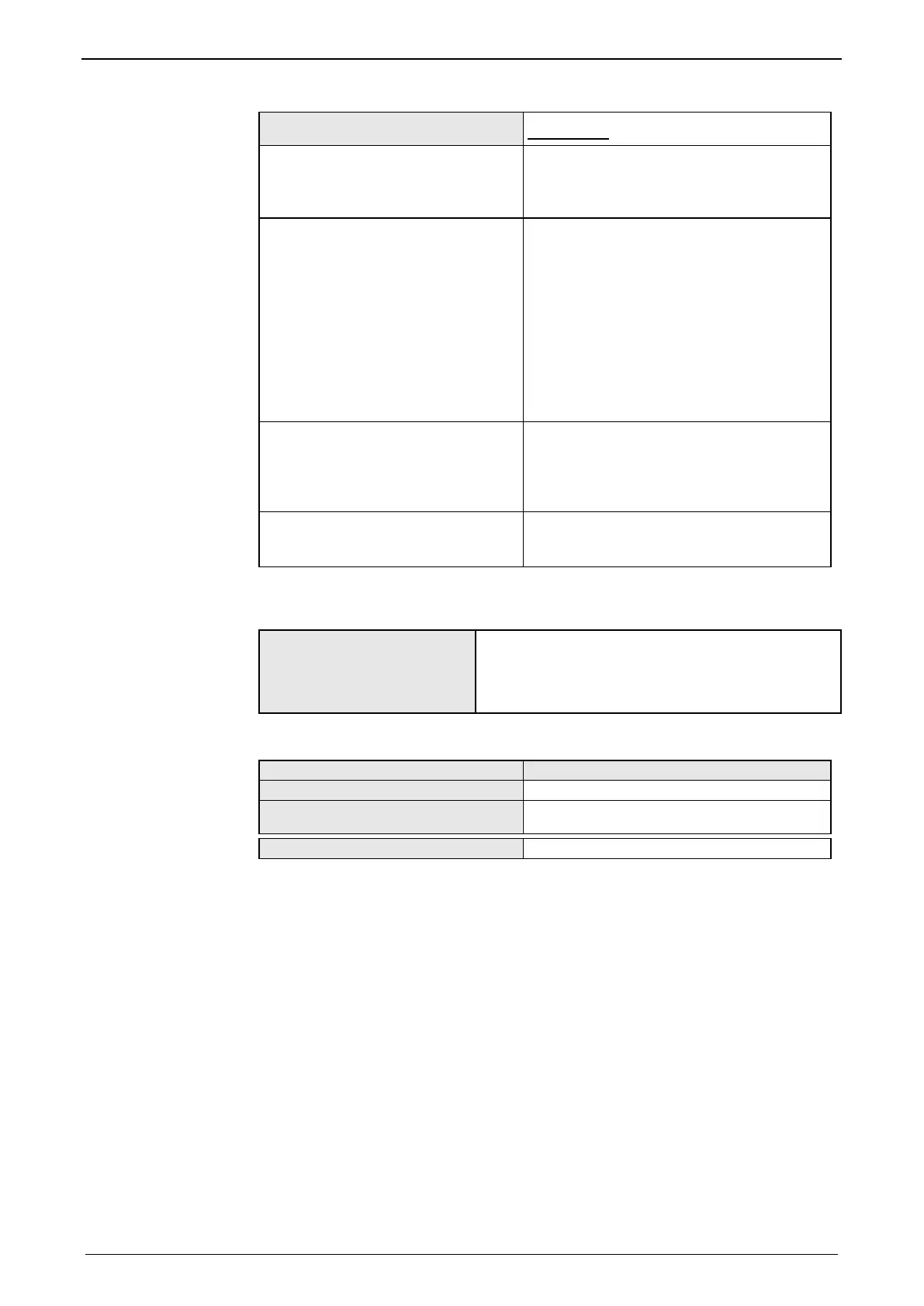
Special encoder systems for direct
drives
Analog hall sensors
Option F12
Sine-Cosine signal (max. 5Vss*; typical
1Vss) 90° offset
U-V signal (max. 5Vss*; typical 1Vss)
Encoder
(linear or rotatory)
Sine-Cosine (max. 5Vss*; typical 1Vss)
(max. 400kHz) or
TTL (RS422) (max. 5MHz; track A o. B)
with the following modes of commutation:
Automatic commutation (see on page
171) or
U, V, W or R, S, T commutation signals
(NPN open collector) e.g. digital hall
sensors, incremental encoders made by
Hengstler (F series with electrical
Digital, bidirectional interface
All EnDat 2.1 or EnDat 2.2 (Endat01,
Endat02) feedback systems with
incremental track (sine-cosine track)
linear or rotary
Distance coded feedback systems
Distance coding with 1VSS - Interface
Distance coding with RS422 - Interface
*Max. differential input between SIN- (X13/7) and SIN+ (X13/8).
Feedback error compensation
Feedback error compensation
Automatic feedback error compensation (offset &
amplification) for analog hall sensors and sine-
cosine encoder can be activated in the
MotorManager.
Motor holding brake output
Motor holding brake output
Voltage range
21 – 27VDC
Maximum output current (short circuit
proof)
1.6A
Securing of brake Compax3M
3.15A
 Loading...
Loading...







