Detailed description
2.3 Continuous -path mode
Basic logic functions: Continuouspath Mode, Exact Stop, LookAhead (B1)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
37
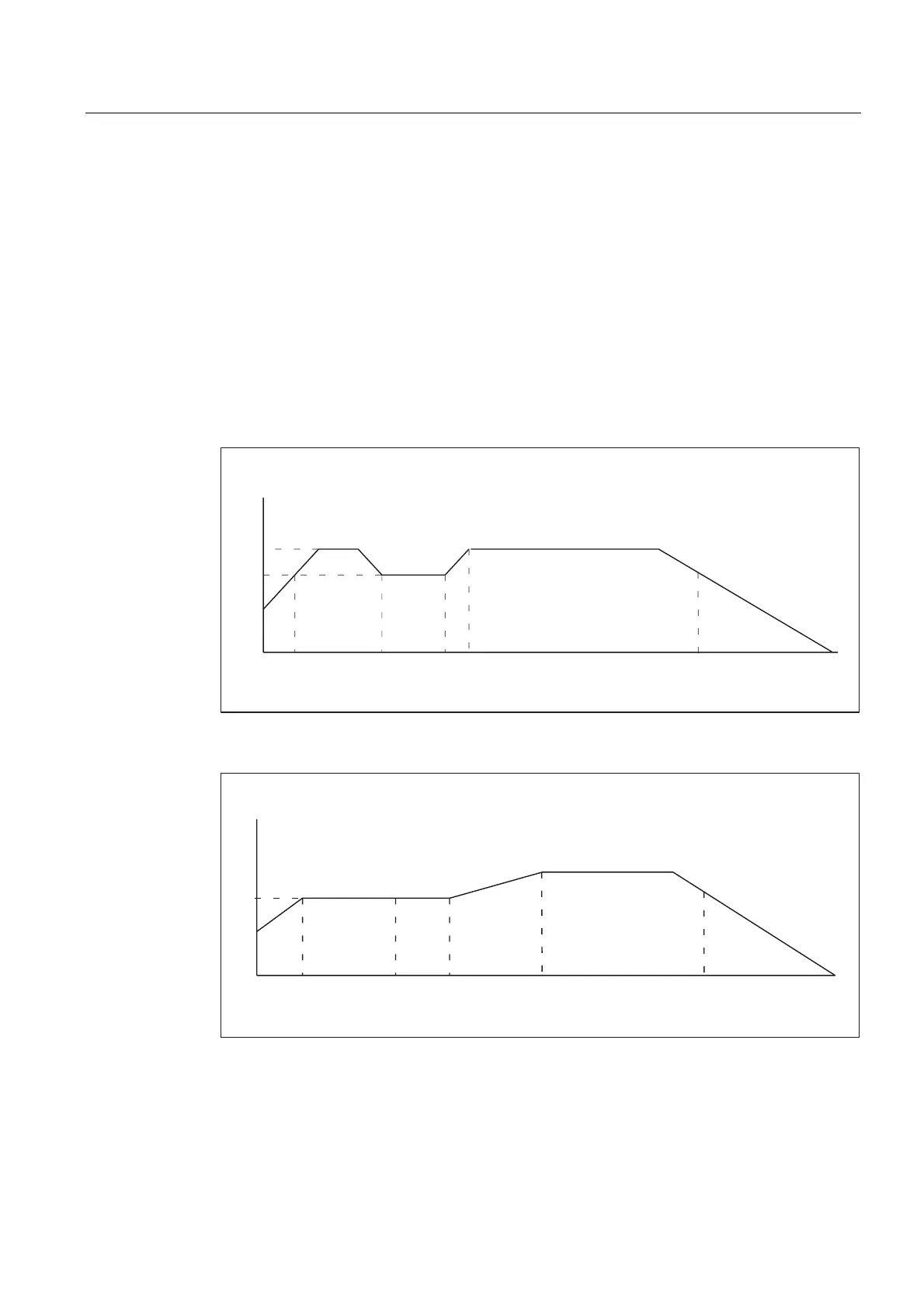
Example 2: Effect of smoothing the path velocity and dynamic response adaptation: acceleration
mode: BRISK
Parameter assignment
Machine data
$MC_ADAPT_PATH_DYNAMIC[0] = 3
$MC_LOOKAH_SMOOTH_FACTOR = 80%
$MA_LOOKAH_FREQUENCY[AX1] = 20 Hz T
AX1
= 1/20 Hz = 50 ms
$MA_LOOKAH_FREQUENCY[AX2] = 20 Hz T
AX2
= 1/20 Hz = 50 ms
$MA_LOOKAH_FREQUENCY[AX3] = 20 Hz T
AX3
= 1/20 Hz = 50 ms
Y
W
W
W
W
W
W
Y
%
Y
Figure 2-10 Path velocity profile optimized for time without smoothing or dynamic adaptation
response
Y
W
W
W W W
W
Y
%
Figure 2-11 Path velocity profile with path smoothing and adaptation of dynamic response
 Loading...
Loading...

















