Detailed description
2.1 Velocities, traversing ranges, accuracies
Basic logic functions: Velocities, Setpoint/Actual Value Systems, Closed-Loop Control (G2)
10 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
2.1.2 Traversing ranges
Range of values of the traversing ranges
The range of values of the traversing range depends on the computational resolution
selected.
If machine data:
MD10200 $MN_INT_INCR_PER_MM
(computational resolution for linear positions) (1000 incr./mm)
or
MD10210 $MN_INT_INCR_PER_DEG
(computational resolution for angular positions) (1000 incr./degree)
are assigned their default values, the following range of values can be programmed with the
input resolution:
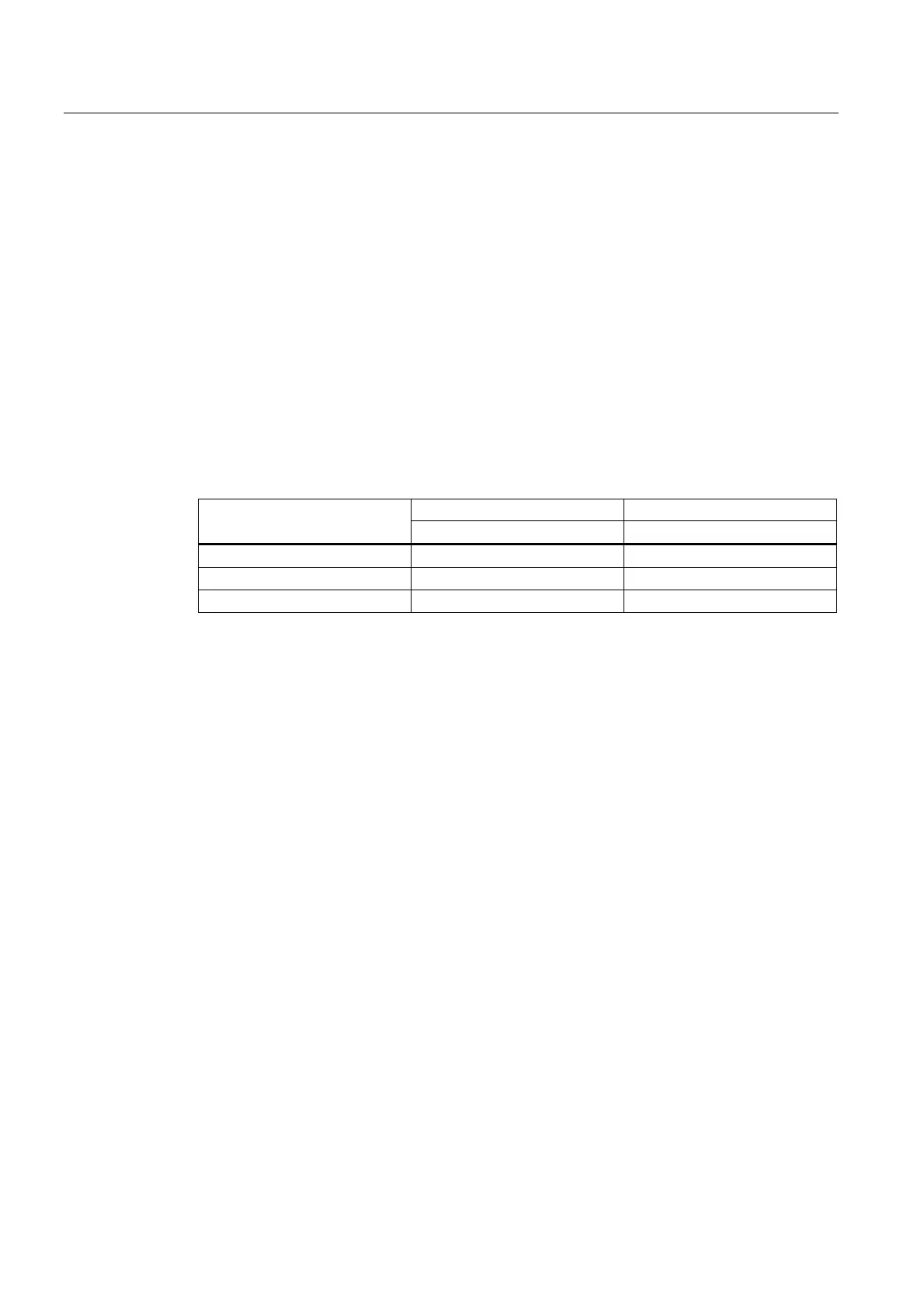
Table 2-1 Traversing ranges of axes
G71 [mm, degrees] G70 [inch, degrees]
Range Range
Linear axes X, Y, Z, etc. ∓ 999.999,999 ∓ 399.999,999
Rotary axes A, B, C, etc. ∓ 999.999,999 ∓ 999.999,999
Interpolation parameters I, J, K ∓ 999.999,999 ∓ 399.999,999
The unit of measurement of rotary axes is always degrees.
If the computational resolution is increased/decreased by a factor of 10, the ranges of values
change accordingly.
The traversing range can be limited by software limit switches and working areas.
References:
/FB1/Function Manual, Basic Functions; Axis Monitoring, Protection Zones (A3)
The traversing range for rotary axes can be limited via machine data.
References:
/FB2/Function Manual, Extended Functions; Rotary Axes (R2)
For special features of linear and rotary axes with a large traversing range, see:
References:
/FB1/ Function Manual, Basic Functions; Reference Point Approach (R1)
 Loading...
Loading...

















