Detailed description
2.3 Setpoint /actual-value system
Basic logic functions: Velocities, Setpoint/Actual Value Systems, Closed-Loop Control (G2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
49
2.3.6 Actual-value processing
Actual-value resolution
In order to be able to create a correctly closed position control loop, the control system must
be informed of the valid actual-value resolution. The axis-specific machine data below are
used for this.
The control calculates the actual-value resolution from the settings made in the MD. The
control parameter sets of the position control are identified as servo parameter sets.
The machining process of the machine forms the basis of the position actual-value
acquisition.
Direct measuring system (DM) is on machine directly: Load-side encoder
Indirect measuring system (IM) is on motor indirectly: Motor-side encoder
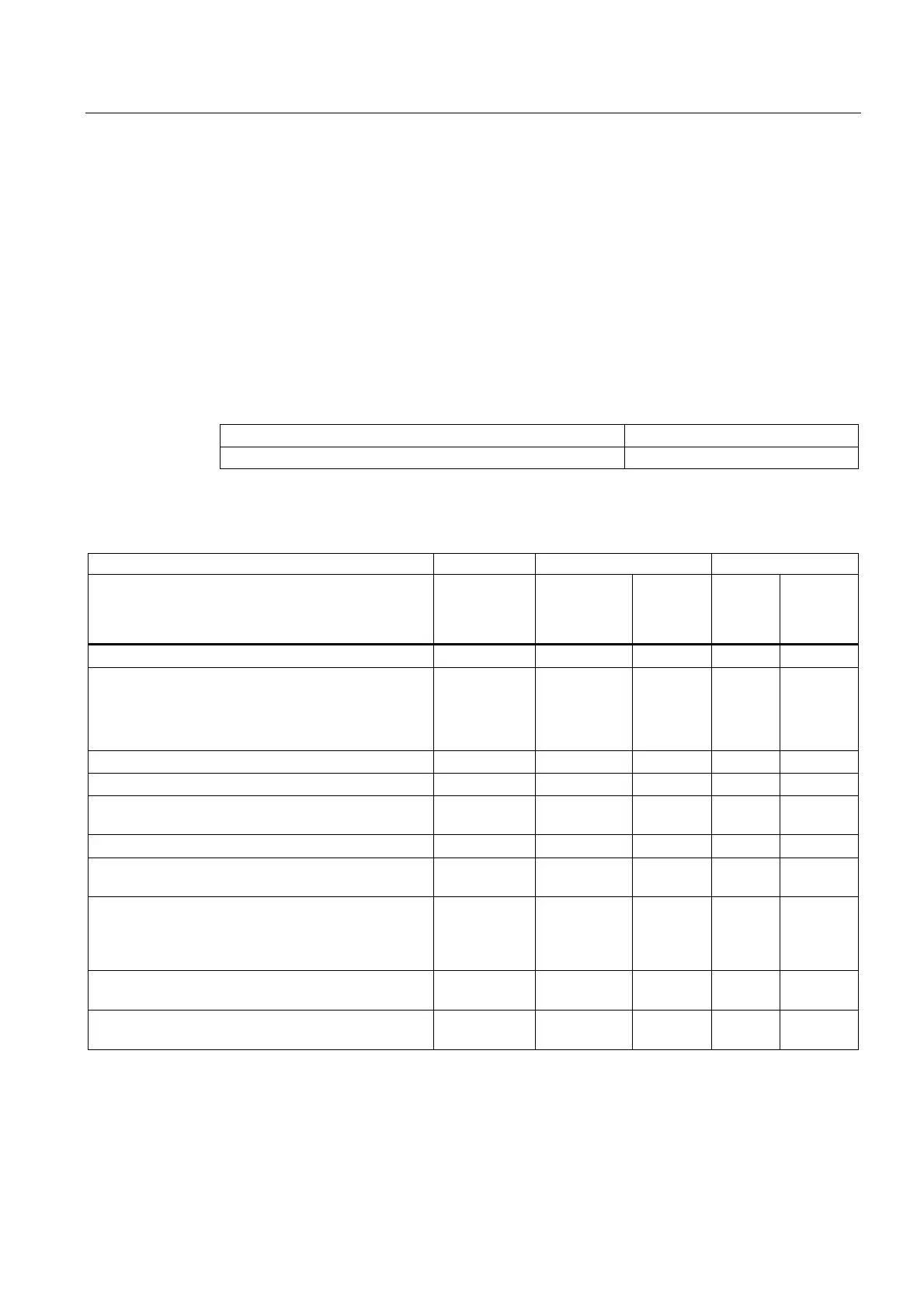
Depending on the type of axis (linear axis, rotary axis) and the type of actual-value
acquisition (directly at the machine, indirectly at the motor), the following machine data must
be parameterized to calculate the actual-value resolution:
Machine data Linear axis Linear axis Rotary axis
Linear scale/
or as direct
measuring
system
Encoder
on
motor
Encoder
on
machine
and/or tool
Encoder
on
motor
Encoder
on
machine
and/or tool
MD30300 $MA_IS_ROT_AX 0 0 0 1 1
MD31000 $MA_ENC_IS_LINEAR[n]
MD31010 $MA_ENC_GRID_POINT_DIST[n]
MD34320 $MA_ENC_INVERS[n]
1
Spacing
Opposite
direction
0
-
-
0
-
-
0
-
-
0
-
-
MD31040 $MA_ENC_IS_DIRECT[n] - / (1) 0 1 0 1
MD31044 $MA_ENC_IS_DIRECT2[n] - / (1) 0 1 0 1
MD31020 $MA_ENC_RESOL[n] - Pulses/
rev
Pulses/
rev
Pulses/r
ev
Pulses/
rev
MD31030 $MA_LEADSCREW_PITCH - mm/rev. mm/rev. - -
MD31050 $MA_DRIVE_AX_RATIO_DENOM[n] - Load rev. - Load
rev.
See
note
MD31060 $MA_DRIVE_AX_RATIO_NUMERA[n] - Motor
rev. if infeed
gear
available
- Motor
rev.
See
note
MD31070 $MA_DRIVE_ENC_RATIO_DENOM[n] - Encoder rev. Encoder
rev.
Encoder
rev.
Encoder
rev.
MD31080 $MA_DRIVE_ENC_RATIO_NUMERA[n] - Motor-
side encoder*
Motor
rev.
Motor
rev.
Load
rev.
- = Does not apply to this combination
* The encoder on the motor side is a built-in encoder and, therefore, does not have a measuring gear unit.
The transmission ratio is always 1:1.
 Loading...
Loading...

















