Detailed description
2.3 Continuous -path mode
Basic logic functions: Continuouspath Mode, Exact Stop, LookAhead (B1)
40 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
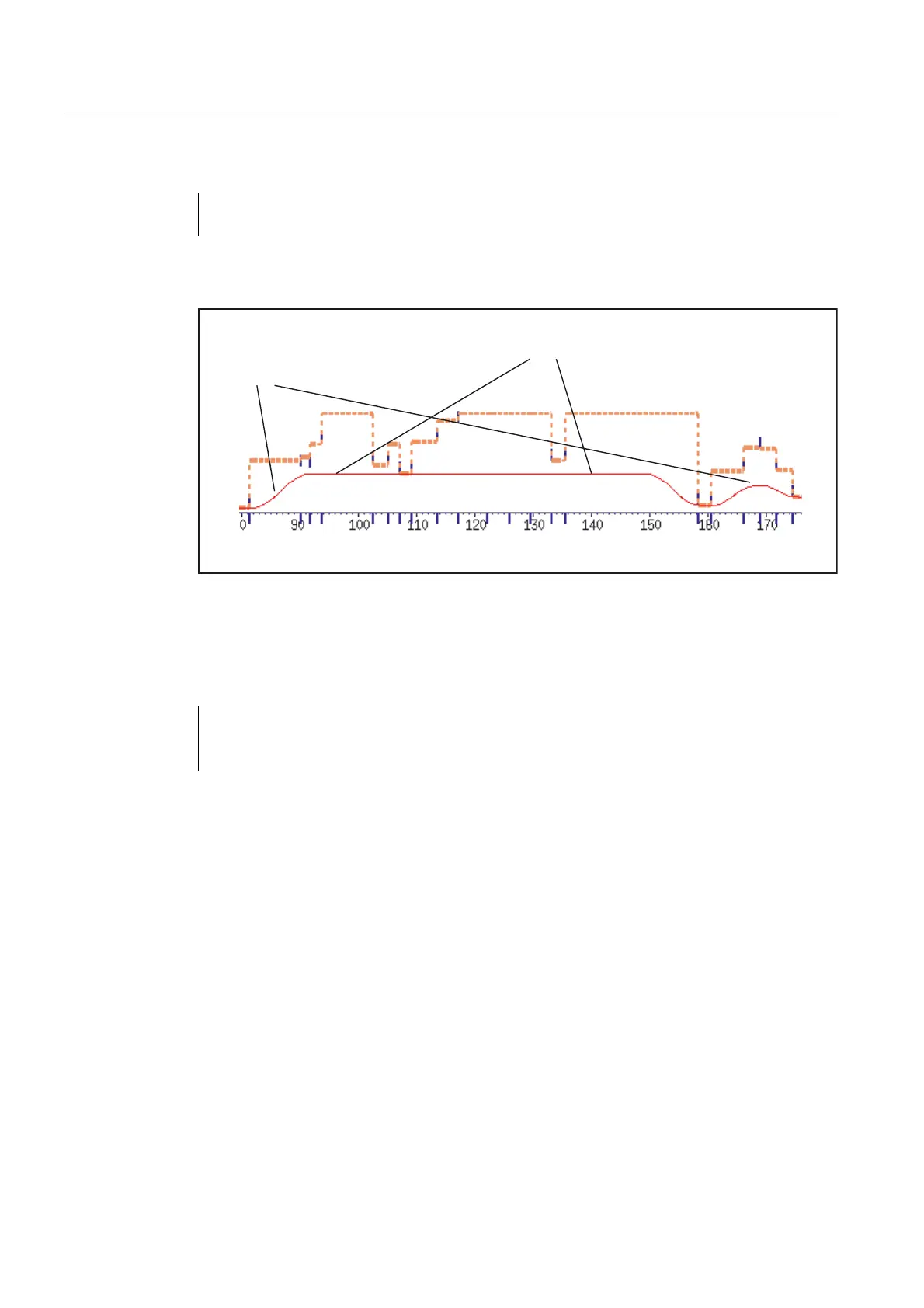
$MC_ADAPT_PATH_DYNAMIC[1] = 4
$MC_LOOKAH_SMOOTH_FACTOR = 1%
With path dynamic response adaptation and path smoothing
7LPHLQLQWHUSRODWLRQ
F\FOHV
6PRRWKHUSDWKYHORFLW\BGXHWR
UHGXFHGSDWKMHUN
1RDFFHOHUDWLRQRUEUDNLQJBHIIHFWRISDWKVPRRWK
LQJ
The path-velocity characteristic has been obtained through selection of path dynamic
response adaptation and path smoothing.
The standard path rounding parameter settings for deselected path smoothing and active
path dynamic response adaptation were selected:
$MC_ADAPT_PATH_DYNAMIC[1] = 4
$MC_LOOKAH_SMOOTH_FACTOR = 0%
(same meaning as $MC_LOOKAH_SMOOTH_FACTOR = 100%)
Installation and startup
The basic prerequisites for starting up the path dynamic response adaptation function are as
follows:
• Determination of the natural frequency of the path axes for parameter assignment of
dynamic response adaptation:
MD32440 $MA_LOOKAH_FREQUENCY (smoothing frequency for LookAhead)
• Determination of the dynamic response limiting values: Velocity, acceleration, and jerk
Determination of the dynamic response limiting values
The determination of the dynamic response limiting values for the traversing of path axes by
means of acceleration with jerk limiting (SOFT) is described below. This procedure can be
transferred analogously to the case of acceleration without jerk limiting (BRISK).
1. Deactivate the dynamic response adaptation:
MD20465 $MC_ADAPT_PATH_DYNAMIC[1] = 1 (adaptation of the path dynamic
response)
 Loading...
Loading...

















