Examples
4.1 Acceleration
Basic logic functions: Acceleration (B2)
54 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
11
$&B295
$&B295
W>PV@
Y>PV@
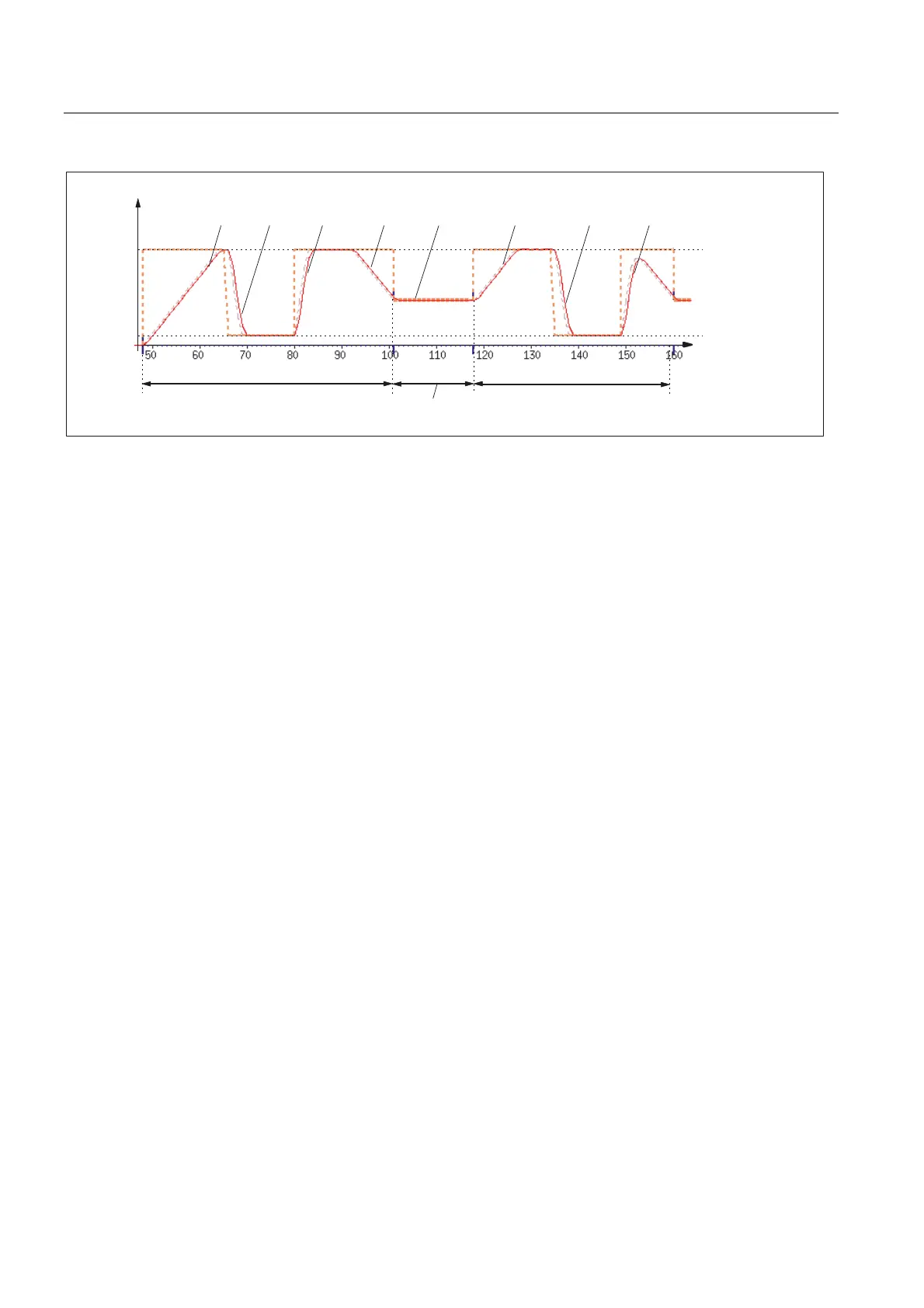
Figure 4-1 Switching between path acceleration specified during preprocessing and real-time acceleration
Acceleration profile: BRISK
1: Accelerate to 100% of path velocity (F10000) in accordance with acceleration default: ACC (N2200...)
2: Brake to 10% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N54...)
3: Accelerate to 100% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N55...)
4: Brake to block end velocity for intermediate smoothing block in accordance with acceleration default: ACC
(N2200...)
5: Speed limitation as a result of smoothing (see 9)
6: Accelerate to 100% of path velocity ($AC_OVR) in accordance with acceleration default: ACC (N2300...)
7: Decelerate as a result of override modification at a rate of acceleration that is in accordance with real-time
acceleration $AC_PATHACC (N53/N54...)
8: Accelerate to 100% of path velocity as a result of override modification ($AC_OVR) in accordance with real-time
acceleration $AC_PATHACC (N53/N55...)
9: Intermediate block inserted within the control as a result of the programmed smoothing (RNDM) (N2200...)
 Loading...
Loading...

















