Detailed description
2.3 Setpoint /actual-value system
Basic logic functions: Velocities, Setpoint/Actual Value Systems, Closed-Loop Control (G2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
57
⇒
MD30300 $MA_IS_ROT_AX = 1
MD31000 $MA_ENC_IS_LINEAR[0] = 0
MD31040 $MA_ENC_IS_DIRECT[0] = 0
MD31020 $MA_ENC_RESOL[0] = 2048
MD31080 $MA_DRIVE_ENC_RATIO_NUMERA[0] = 1
MD31070 $MA_DRIVE_ENC_RATIO_DENOM[0] = 1
MD31060 $MA_DRIVE_AX_RATIO_NUMERA[0] = 5
MD31050 $MA_DRIVE_AX_RATIO_DENOM[0] = 1
MD10210 $MN_INT_INCR_PER_DEG = 1000
GHJUHHV
LQFUGHJUHHV
,QWHUQDOLQFUHPHQWVGHJUHHV
(QFRGHULQFUHPHQWVGHJUHHV
Result:
1 encoder increment corresponds to 0.017166 increments of the internal unit.
The encoder resolution is thus coarser than the computational resolution by a factor of 58.
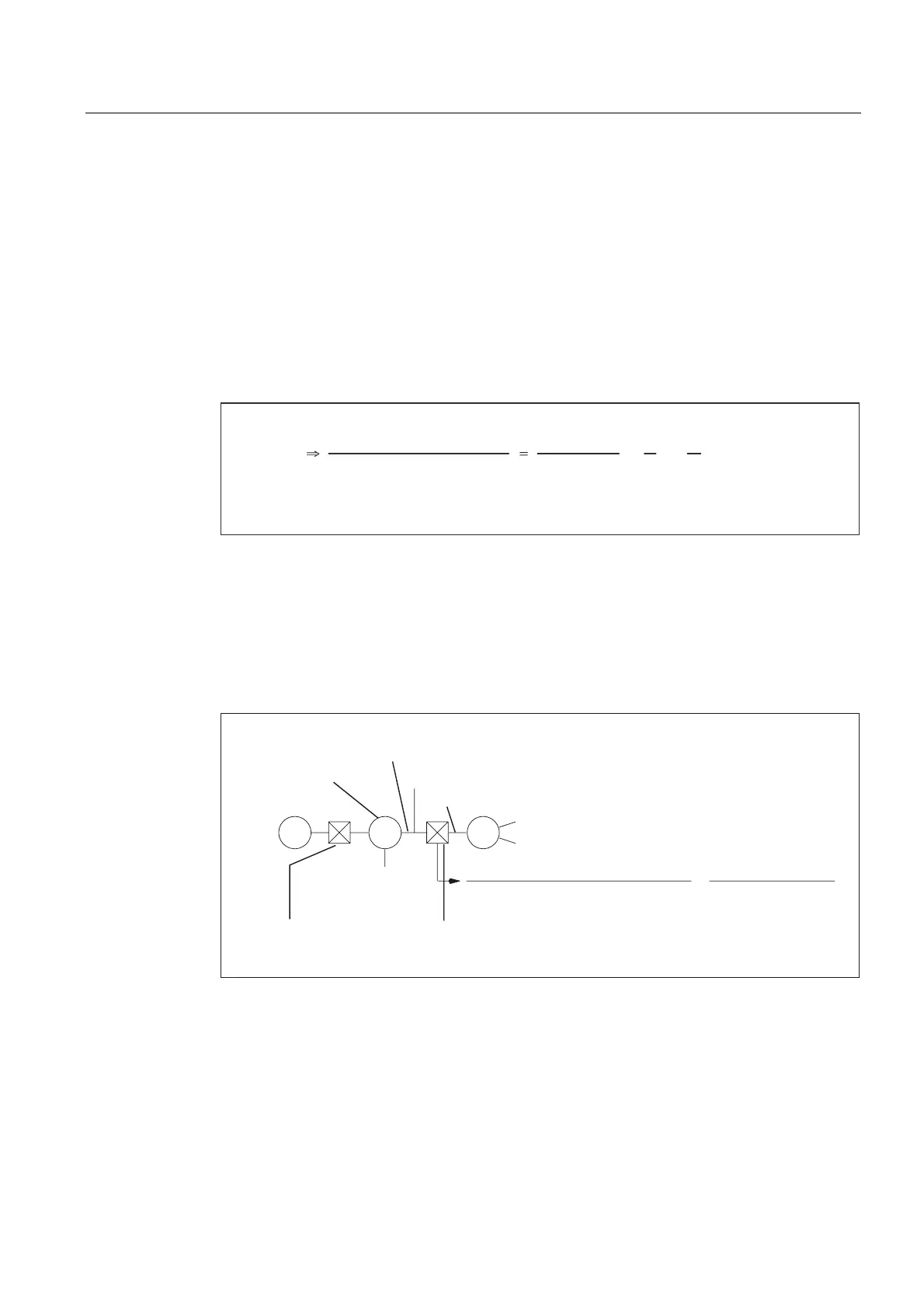
Rotary axis with rotary encoder on the machine
,6B527B$;
Q
Q
(1&B,6B/,1($5B
(1&B5(62/
'5,9(B(1&B5$7,2B180
'5,9(B(1&B5$7,2B'(120(5$
(1&B,6B',5(&7
*0/
1RRIORDGUHYV
1RRIHQFRGHUUHYV
5HVROYHUJHDULQJ
/RDGJHDU
5RWDU\WDEOH
/RDG
(QFRGHU
Figure 2-10 Rotary axis with rotary encoder on the machine
In order to adapt the actual-value resolution to the calculation resolution, the control
calculates the quotients from the "internal increments/degree" and the "encoder
increments/degree" as follows:
 Loading...
Loading...

















