Detailed description
2.5 Optimization of the control
Basic logic functions: Velocities, Setpoint/Actual Value Systems, Closed-Loop Control (G2)
84 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
Example
Setting result after several iterative processes for
K
R and T
n
.
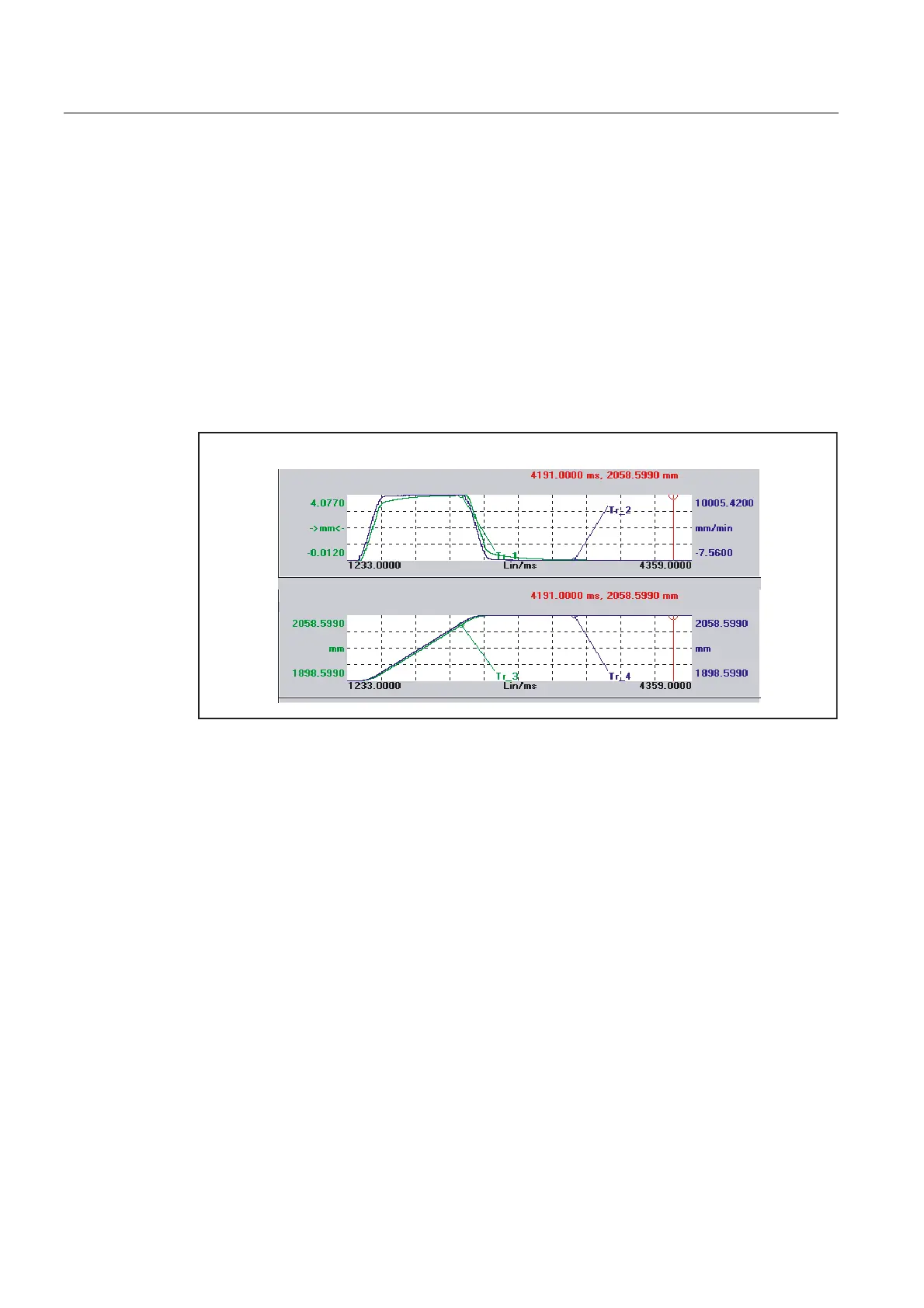
Each of the following quantities - following error, actual velocity, actual position, and position
setpoint - has been recorded by servo trace. When traversing in JOG mode, the
characteristic of the individual data shown in the following figure was then drawn.
Set machine data:
MD32220 $MA_POSCTRL_INTEGR_ENABLE = 1
MD32210 $MA_POSCTRL_INTEGR_TIME = 0.003
MD32200 $MA_POSCTRL_GAIN[1] = 5.0
Parameter set selection 0
*UDSKLF7U$[LV;7U$[LV;!
*UDSKLF7U$[LV;7U$[LV;!
7U)ROORZLQJHUURU
7U$FWXDOSRVLWLRQPHDVXULQJV\VW
7U$FWXDOYHORFLW\
7U3RVLWLRQVHWSRLQW
0DUNHU;
0DUNHU;
Figure 2-14 Following error (1), actual velocity (2), position actual value (3), position setpoint (4)
 Loading...
Loading...

















