Detailed description
2.4 Frames
Basic logic functions: Axes, coordinate systems, frames (K2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
65
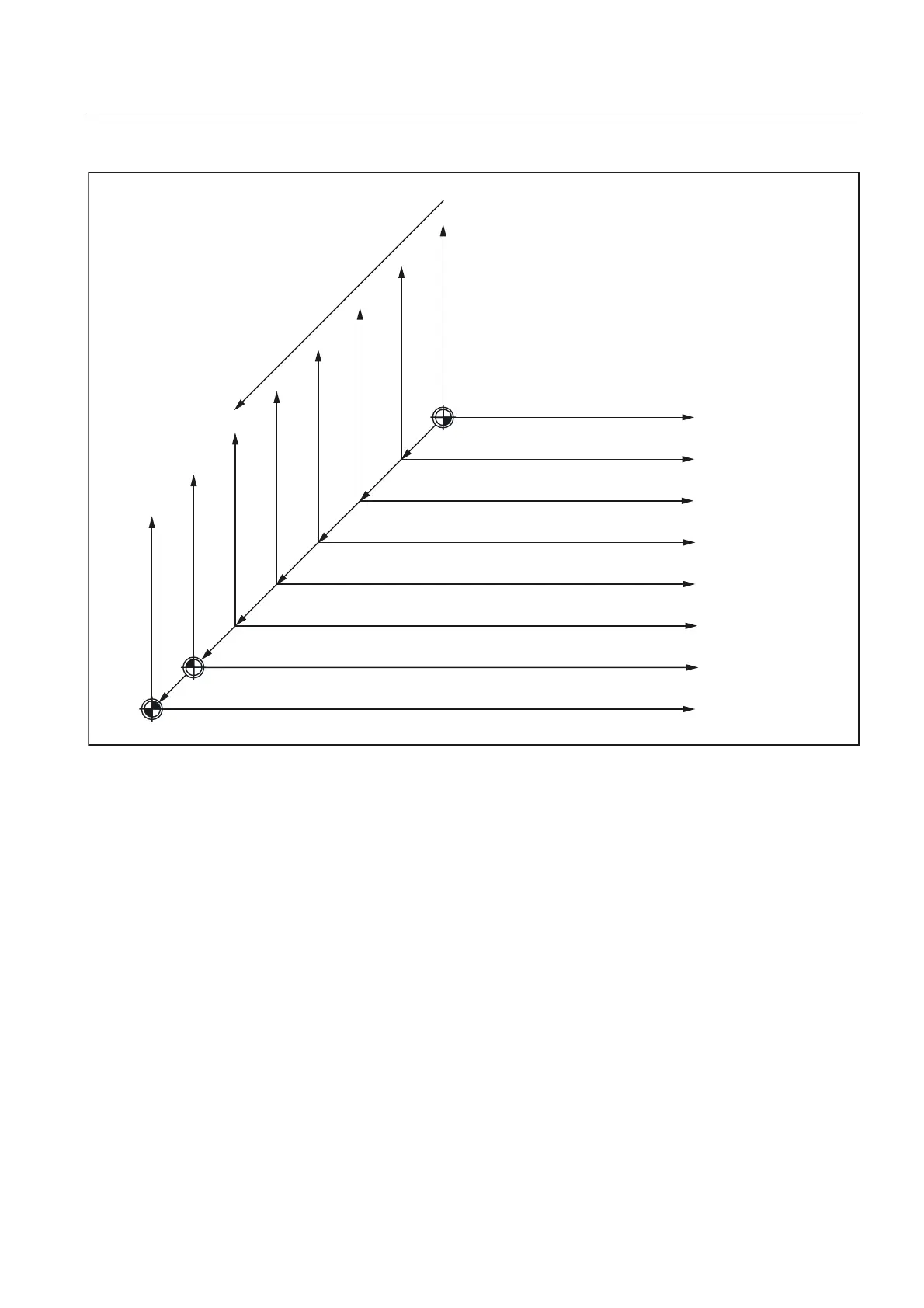
:&63&6
6=6$&6
%=6)&6
%&6%&6
0&60&6
5HIHUHQFHSRLQWRIIVHW
+DQGZKHHO'5)RIIVHWVXSHULPSRVHGPRYHPHQW]HURRIIVHW
H[WHUQDONLQHPDWLFWUDQVIRUPDWLRQ
)UDPHFKDLQ
3B3$57)5$0(3B6(7)5$0(3B(;7)5$0(
3B,62)5$0(3B,62)5$0(3B,62)5$0(
3B75$)5$0(3B3)5$0(
3B,62)5$0(3B&<&)5$0(
3B722/)5$0(3B:3)5$0(
3B,)5$0(
3B$&7%)5$0(
WCS: Workpiece Coordinate System
SZS: Settable Zero System
BZS: Basic Zero System
BCS: Basic Coordinate System
MCS: Machine Coordinate System
PCS: Part Coordinate System
ACS: Adjustable Coordinate System
FCS: Foot Coordinate System
BCS: Basic Coordinate System
MCS: Machine Coordinate System
The current complete frame is calculated according to the formula below:
$P_PARTFRAME : $P_SETFRAME : $P_EXTFRAME :
$P_ISO1FRAME : $P_ISO2FRAME : $P_ISO3FRAME :
$P_ACTBFRAME : $P_IFRAME :
$P_ACTFRAME =
$P_TOOLFRAME : $P_WPFRAME : $P_TRAFRAME:
 Loading...
Loading...

















