Detailed description
2.4 Frames
Basic logic functions: Axes, coordinate systems, frames (K2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
79
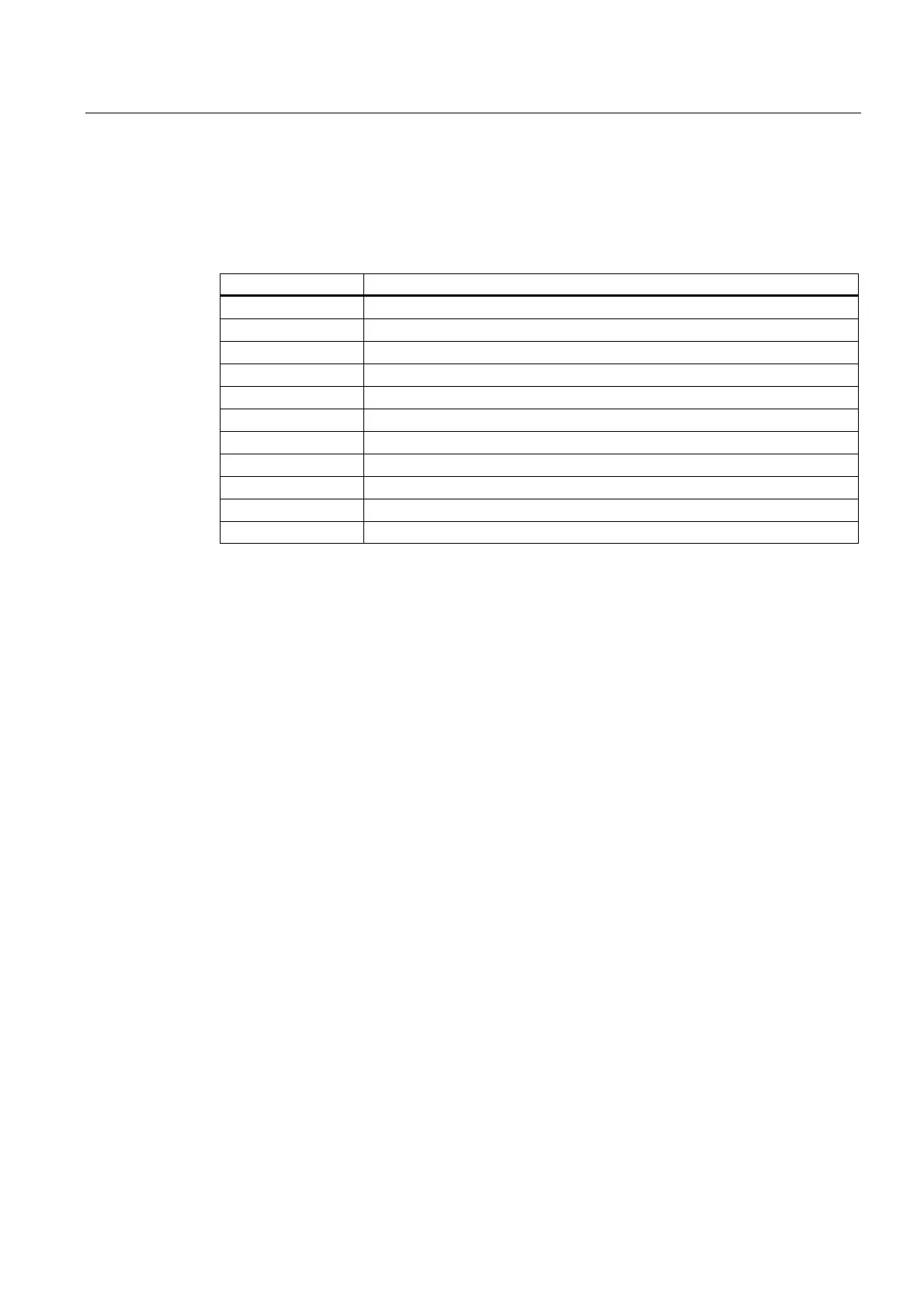
System frames in data management
The system frames are stored in the static NC memory and can, therefore, be archived and
reloaded. System frames in data management can be read and written in the program using
the following variables:
System variables Significance
$P_SETFR System frame for PRESET and scratching (SetFrame)
$P_EXTFR System frame for zero offset external (ExtFrame)
$P_PARTFR System frame for TCARR and PAROT (PartFrame)
$P_TOOLFR System frame for TOROT and TOFRAME (ToolFrame)
$P_WPFR System frame for workpiece reference points (Work Piece Frame)
$P_CYCFR System frame for cycles (Cycle Frame)
$P_TRAFRAME System frame for transformations (Transformation Frame)
$P_ISO1FR Frame for G51.1 mirroring (ISO)
$P_ISO2FR Frame for G68 2DROT (ISO)
$P_ISO3FR Frame for G68 3DROT (ISO)
$P_ISO4FR System frame for G51 scale (ISO)
All write operations to these frames must be executed using system functions. For cycle
programmers, it has been made possible to write the frames using the above variables.
Attempts to write to a non-configured system frame are rejected with the alarm "Channel %1
block %2 name %3 not defined or option not available".
System frames in the data management are either activated directly with the system function
(TOROT, PAROT, etc.), or with aG500, G54 to G599 instruction.
Active system frames
The active system frames are the frames, which are active in the main run. An appropriate
current system frame exists for each system frame in the data management. Only with the
activation of the data management frame are the values taken into account with regard to
the preprocessing.
The following current system frames exist:
• $P_SETFRAME
In the part program, the variable $P_SETFRAME can be used to read and write the
current system frame for PRESET and scratching. The variable returns a zero frame if the
system frame is not configured through MD28082.
• $P_EXTFRAME
In the part program, the variable $P_EXTFRAME can be used to read and write the
current system frame for the zero offset external. The variable returns a zero frame if the
system frame is not configured through MD28082.
• $P_PARTFRAME
In the part program, the variable $P_PARTFRAME can be used to read and write the
current system frame for TCARR and PAROT for toolholders with orientation capability. The
variable returns a zero frame if the system frame is not configured through MD28082.
 Loading...
Loading...

















