3. The default setting of the drive does not allow switching between LOCAL and REMOTE during run. To allow the drive to switch between
LOCAL and REMOTE during run, Refer to b1-07: LOCAL/REMOTE Run Selection on page 132.
Setting 2: External Reference 1/2 Selection
This function switches the Run command and frequency reference source between External reference 1 and 2 if the drive is
in the REMOTE mode.
Status Description
Open External reference 1 is used (defined by parameters b1-01 and b1-02)
Closed External reference 2 is used (defined by parameters b1-15 and b1-16)
Note: Default drive settings do not allow switching between External reference 1 and 2 during run. Refer to b1-07: LOCAL/REMOTE Run
Selection on page 132 if this feature is required by the application.
Setting 3 to 5: Multi-Step Speed Reference 1 to 3
Switches multi-step speed frequency references d1-01 to d1-08 by digital inputs. Refer to d1: Frequency Reference on page
169 for details.
Setting 6: Jog Reference Selection
The Jog frequency set in parameter d1-17 becomes the frequency reference when the input terminal closes. Refer to d1:
Frequency Reference on page 169 for details.
Setting 7: Accel/Decel Time Selection 1
Switches between accel/decel times 1 (C1-01 and C1-02) and 2 (C1-03 and C1-04). Refer to C1-01 to C1-08: Accel, Decel
Times 1 to 4 on page 154 for details.
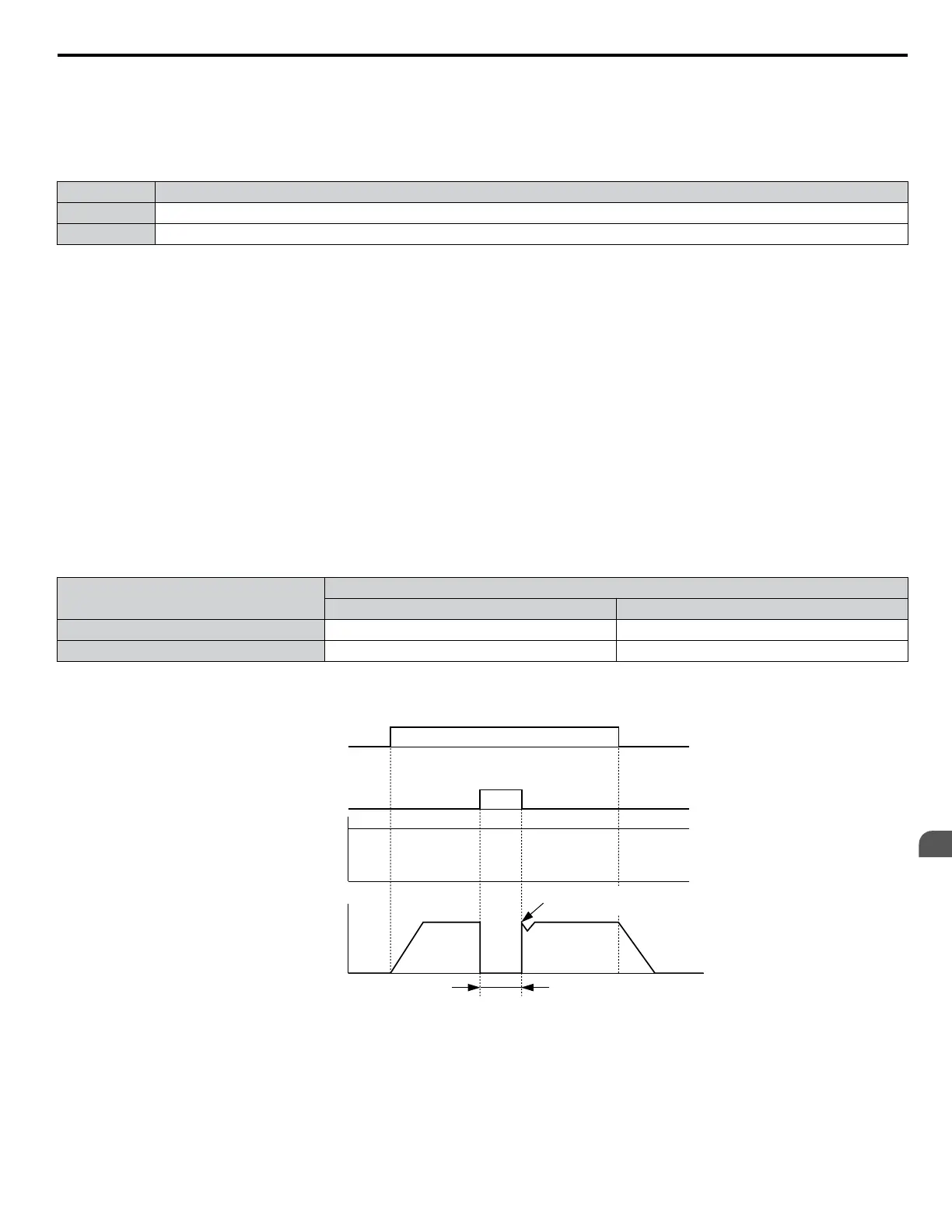
Setting 8, 9: Baseblock Command (N.O., N.C.)
When the drive receives a baseblock command, the output transistors stop switching, the motor coasts to stop, and a bb alarm
flashes on the digital operator to indicate baseblock. When baseblock ends while a Run command is active, the drive performs
Speed Search to restart the motor.
DIgital Input Function
Drive Operation
Input Open Input Closed
Setting 8 (N.C.) Baseblock (Interrupt output) Normal operation
Setting 9 (N.O.) Normal operation Baseblock (Interrupt output)
WARNING! Sudden Movement Hazard. When using a mechanical holding brake with the drive in a lifting application, close the brake when
the drive output is cut off by a baseblock command triggered by one of the input terminals. Failure to comply will result in a slipping load
from the motor suddenly coasting when the baseblock command is entered and may cause serious injury or death.
Begin Speed Search from the
previous frequency reference
Run command
Baseblock input
Frequency
reference
Output frequency
OFF ON
Output off, motor coasts
ON
Baseblock
release
Figure 5.57 Baseblock Operation During Run
Setting A: Accel/Decel Ramp Hold
When the digital input programmed for the Accel/decel ramp hold function closes, the drive locks (holds) the output frequency.
Acceleration or deceleration resumes when the input is reopened.
5.7 H: Terminal Functions
YASKAWA ELECTRIC SIEP C710616 31B YASKAWA AC Drive – A1000 Technical Manual
209
5
Parameter Details

 Loading...
Loading...










