Chapter 8 Logic Instructions
8-219
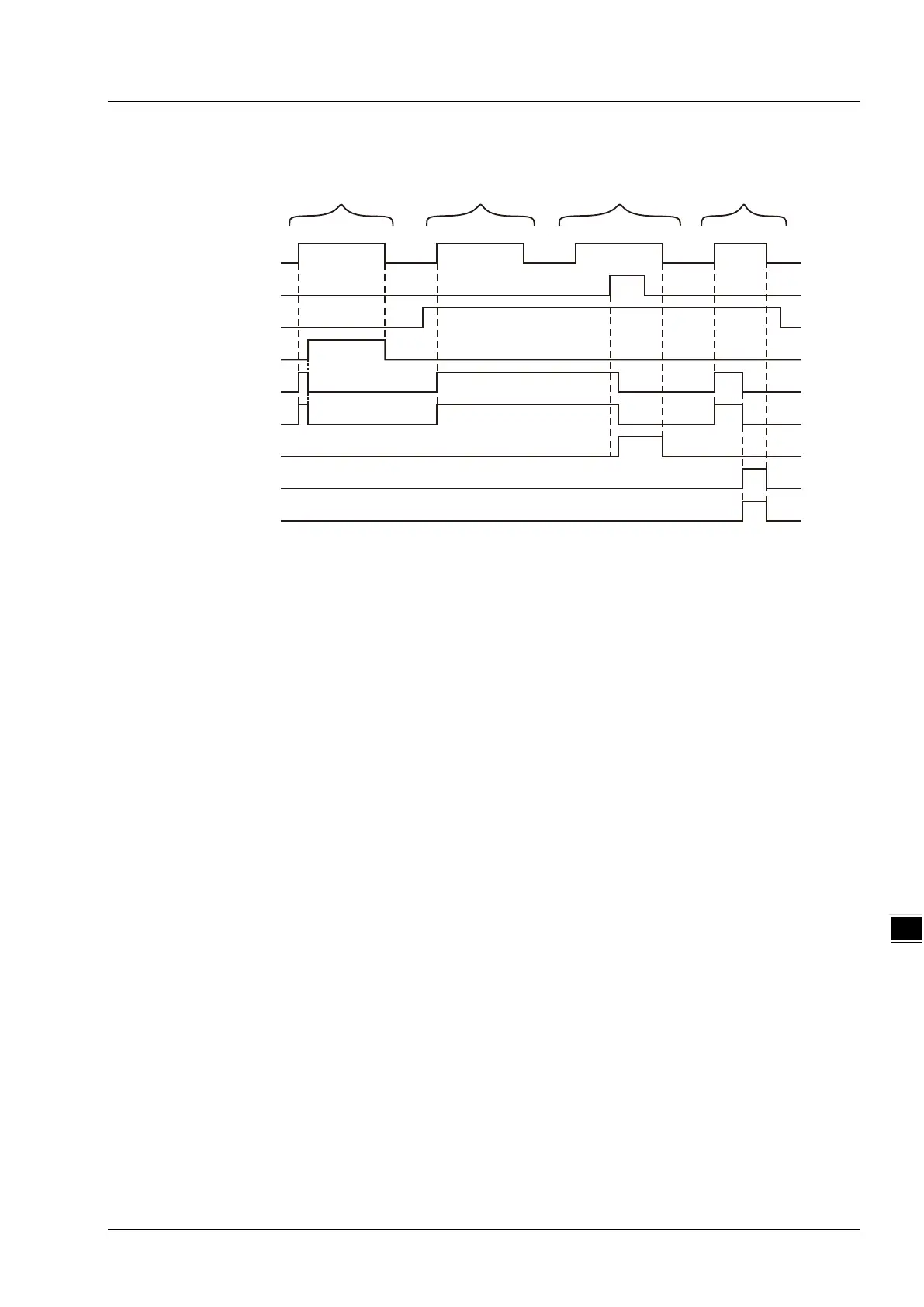
Output Update Timing Chart
Execute
Abort
Busy
Active
Case1
Case2 Case3
Case4
Done
CyclicRun
Aborted
Error
ErrorID
Case 1 When Execute changes from FALSE to TRUE, Busy and Active change to TRUE if you choose
the mode to send only one piece of data. When one piece of Socket data sending is completed,
Done changes to TRUE and meanwhile Busy and Active changes to FALSE. When Execute
changes from TRUE to FALSE, Done changes to FALSE.
Case 2 When Execute changes from FALSE to TRUE, Busy and Active change to TRUE and the
instruction starts to control the controller for sending Socket data if you choose the mode to
cyclically send data. When Execute changes from TRUE to FALSE, the TRUE state of Busy and
Active keep unchanged.
Case 3 The output state will keep unchanged by setting Execute from FALSE to TRUE again after case
2. By setting Abort from FALSE to TRUE, one cycle later, Aborted changes to TRUE and Busy
and Active change to FALSE. When Abort changes from TRUE to FALSE, the output will keep
unchanged. When Execute changes from TRUE to FALSE, Aborted changes to FALSE.
Case 4 When Execute changes from FALSE to TRUE, Busy and Active change to TRUE. When an
error occurs in the instruction execution, Error changes to TRUE and the value in ErrorID shows
corresponding error code and meanwhile Busy and Active change to FALSE. When Execute
changes from TRUE to FALSE, Error changes to FALSE and the value in ErrorID changes to 0.
Function
ETH_Socket_Send is used for sending Socket data. The firmware of V1.02 and above supports the
function.
1. The input paramter CyclicRun sets whether to cyclically send data or not and CycleTime value is the
time of a cycle. When CyclicRun is TRUE and ETH_Socket_Send instruction is executed, the
controller sends a piece of data every a period of time which is the vaue of CycleTime. When
CyclicRun is FALSE and ETH_Socket_Send instruction is executed, the controller only sends out one
piece of data.
2. When the value of CycleTime is 0 and CyclicRun is TRUE, the controller still sends data cyclically
without any limit in time interval.
3. If the input parameter value is changed and then the instruction is retriggered during the instruction
 Loading...
Loading...









