DVP-15MC Series Motion Controller Operation Manual
8-222
Note:
The input parameter Receive_Buffer_Address represents the first register address where the data the
controller receives are stored, and the parameter Receive_Length is the length of the data received by the
controller. The two input values must be set.
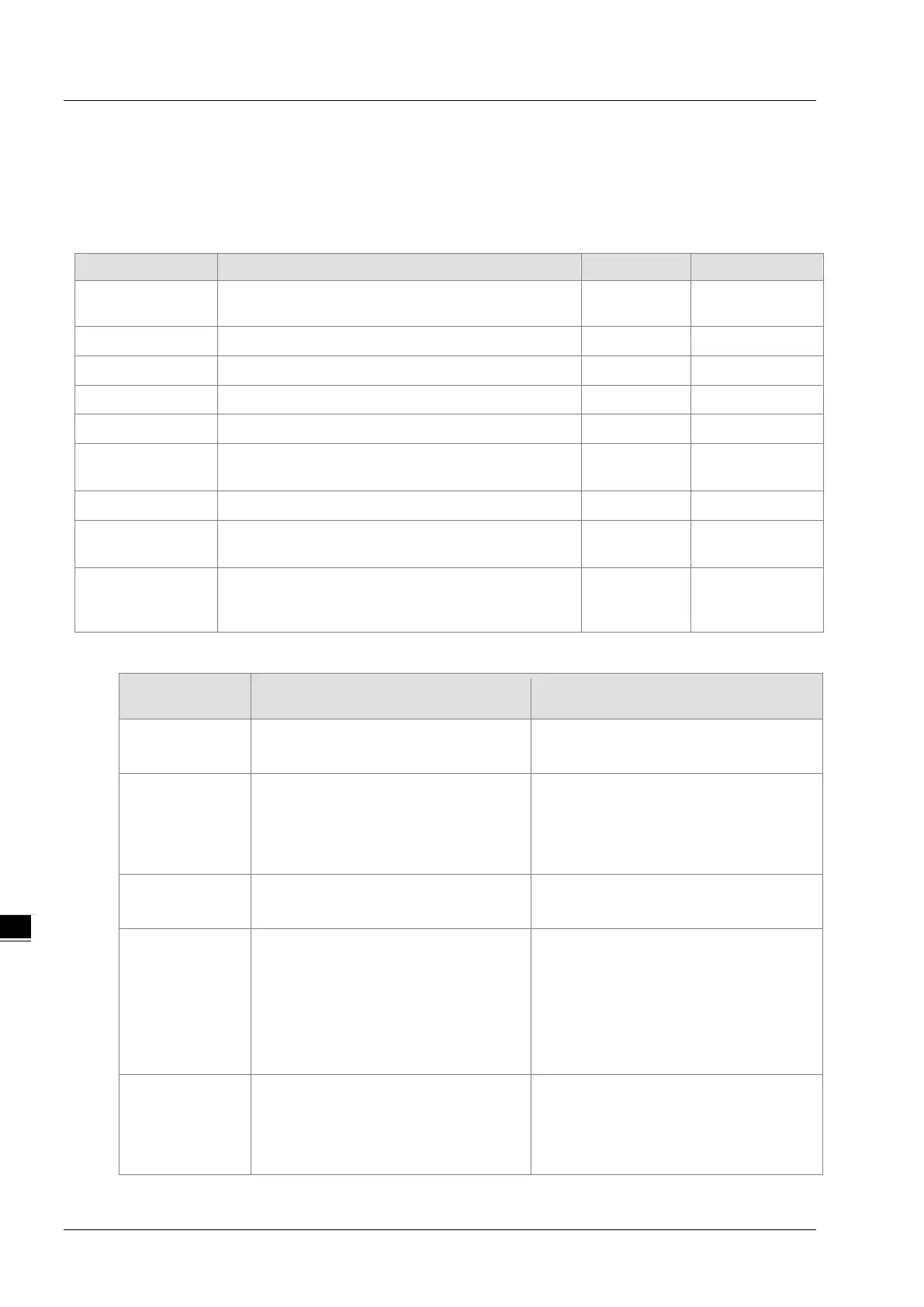
Output Parameters
Done
TRUE when the one-time socket data receiving is
complete in the only-one-time data receiving mode.
BOOL TRUE/FALSE
TRUE when Socket data receiving is completed.
TRUE when Socket data are being received.
The size of the data which are actually received.
TRUE when the instruction is being executed.
Active
TRUE when the instruction is controlling the
controller for receiving data.
BOOL TRUE/FALSE
TRUE when the instruction execution is aborted.
Error
TRUE when an error occurs in the instruction
execution.
BOOL TRUE/FALSE
ErrorID
Contains error codes when an error occurs in the
instruction execution. Please refer to section 12.2
for the corresponding error code.
WORD
Output Update Timing
Timing for changing to TRUE Timing for changing to FALSE
Done
When the instruction execution is
When Execute changes from TRUE
Received
When one piece of Socket data
receiving is completed.
When Execute changes from TRUE
to FALSE.
When the instruction starts receiving
the next piece of data.
Receiving
While one piece of Socket data is
When one piece of Socket data
receiving is completed.
Busy
When Execute changes to TRUE.
When Done changes from FALSE to
TRUE;
When the instruction execution is
aborted;
When Error changes from FALSE to
TRUE.
Active
When the instruction is controlling
the controller for receiving data.
When Done changes from FALSE to
TRUE.
When the instruction

 Loading...
Loading...








