Chapter 8 Logic Instructions
8-251
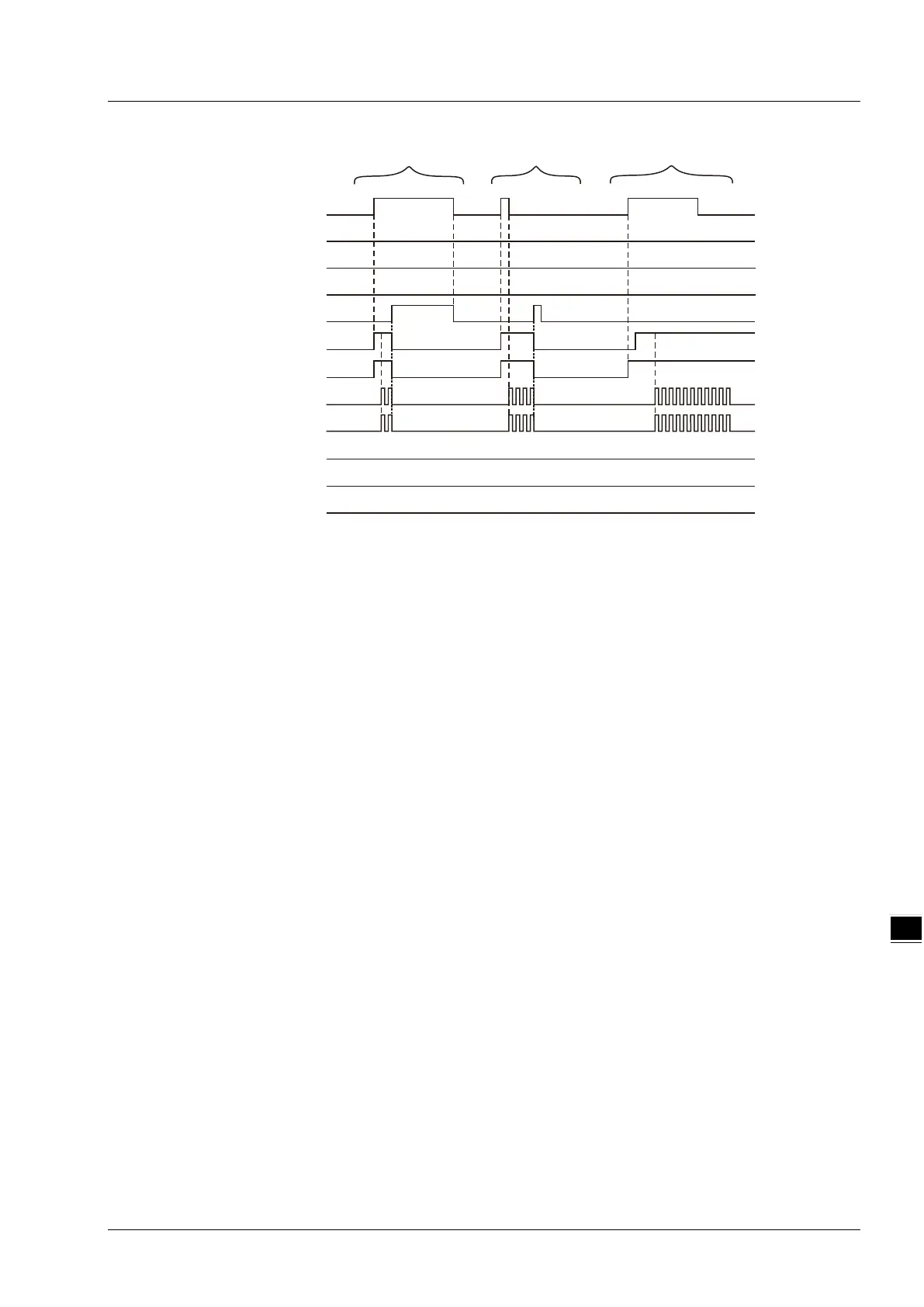
Execute
Abort
Done
Active
NewCycle
Received
Case 7
Aborted
Case 8 Case 9
Error
ErrorID
Received_Timeou t
CyclicRun
Bu sy
Case 6: In the event that the timeout of receiving data occurs, when Execute changes from FALSE to
TRUE, Busy changes to TRUE and after a while, Receive_Timeout changes to TRUE. When
the communication is restored to normal, both of NewCycle and Received start to change
between TRUE and FALSE alternately.
Case 7: In the multi-cycle state where Execute is TRUE, when the instruction is aborted by other
instruction, Aborted changes to TRUE, Execute changes to FALSE and Aborted changes to
FALSE.
Case 8: In the multi-cycle state where Execute is FALSE, when the instruction is aborted by other
instruction, Aborted changes to TRUE and one cycle later, changes to FALSE.
Case 9: When the instruction is aborted by other instruction, Busy changes to TRUE. After a while,
Active changes to TRUE and other outputs give corresponding output according to the cases
above.
Function
RS485_RS is used to configure RS485 free protocol communication parameters and watch the
communication status. The firmware of V1.01 and above supports the function.
Precaution
1. RS485_RS does not add the checksum automatically. In ASCll mode, the data sent out are required
to be the ASCll message which has been converted into.
2. The total length of sent data is 200 Bytes. The length set in the instruction does not include that of
the start and end of sent messages.
3. Add_STX_ET sets if the header and footer codes are added or not in the sent message. The function
is only enabled when the header and footer codes of the sent message are identical to those of the
received message. Otherwise, the function can not be enabled if the header and footer codes of the
sent message differ from those of the received message and in this case, an error will occur if the
function is enabled.
a. The header code and footer code set in the instruction are for the sent messages. If the sent
message is correct but the header code and footer code in the received message are different
from those of the sent message, the controller will fail to receive the message and the timeout
will happen during receiving.
b. The header code and footer code set in the instruction are for the sent message. So the slave
will not give a response if the sent message does not conform to the slave message requirement .
Thus, the function could not be enabled when the header and footer codes of the sent message are
not identical to those of the received message.

 Loading...
Loading...








