DVP-15MC Series Motion Controller Operation Manual
8-314
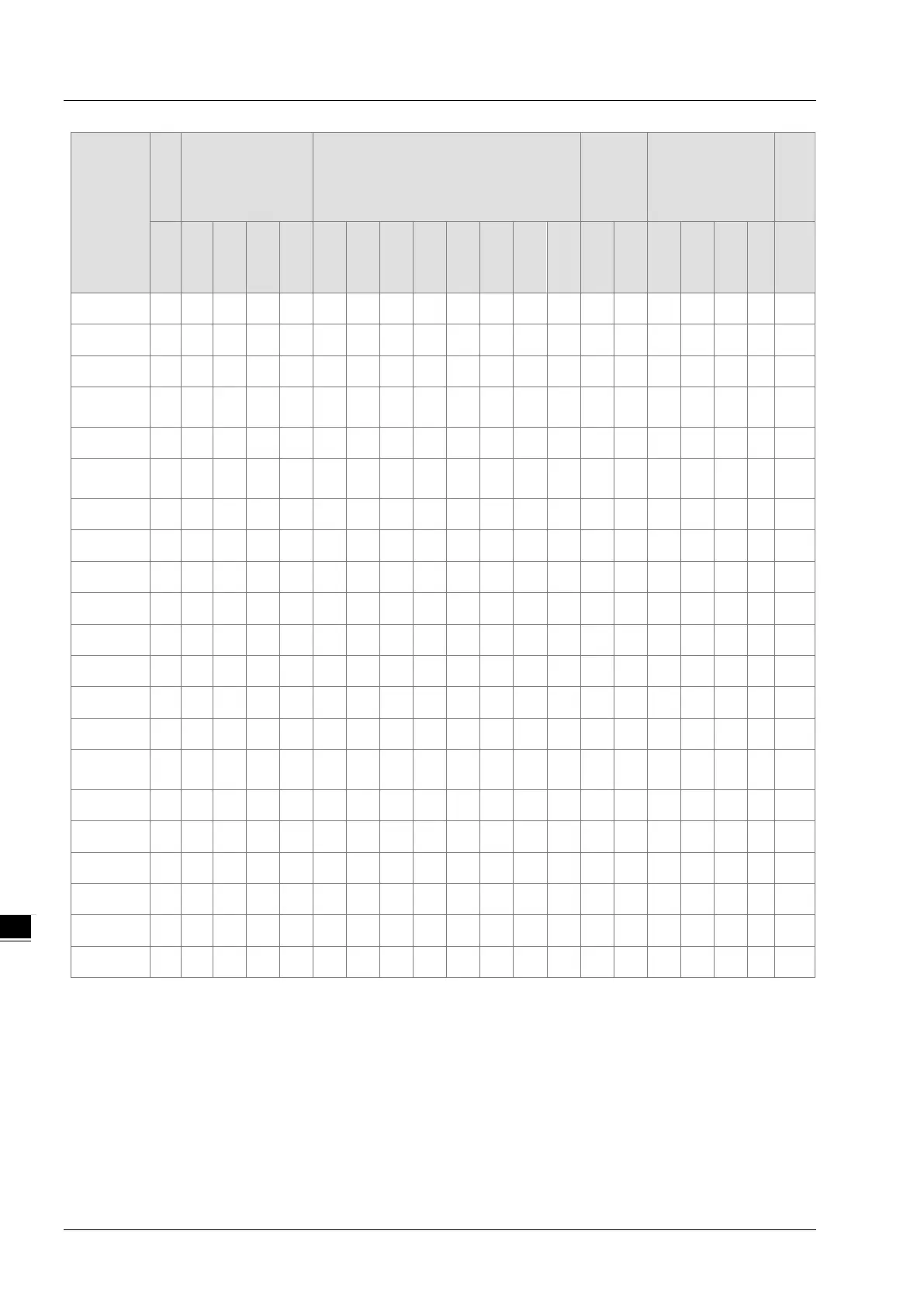
Boolean
Bit string Integer
Real
number
Time, date
String
BOOL
BYTE
WORD
DWORD
LWORD
USINT
UINT
UDINT
ULINT
SINT
INT
DINT
LINT
REAL
LREAL
TIME
DATE
TOD
DT
STRING
PID_RUN
●
SV
●
PV
●
●
PID_MAN
●
●
CYCLE
●
Kc_Kp
●
Ti_Ki
●
Td_Kd
●
Tf
●
PID_EQ
●
PID_DE
●
PID_DIR
●
ERR_DB
●
MV_MAX
●
MV_MIN
●
MOUT
●
BIAS
●
I_MV
●
MV
●
Note:
The instruction is used to implement the PID operation. The PID operation is conducted only when PID
instruction is performed by PLC. PID stands for Proportion, Integral and Derivative. The PID control is widely
applied to mechanical equipment, pneumatic equipment and electronic equipment.
Function Explanation
There is no limit to how many times the instruction can be used. However, the variable specified by
I_MV can not be used by other program repeatedly.
PID instruction can only be used in the cyclic task.
As long as PID is scanned, according to the sampling time specified by CYCLE, the PID operation
is implemented and the MV value is output directly. The PLC will not calculate automatically
 Loading...
Loading...









