Chapter 8 Logic Instructions
8-315
whether the scan time reaches the sampling time specified by CYCLE so as to output.
The present value (PV) of PID must be a steady value before PID operation is performed. If the
input values of special modules are to be captured for PID operation, users should notice the A/D
conversion time of modules.
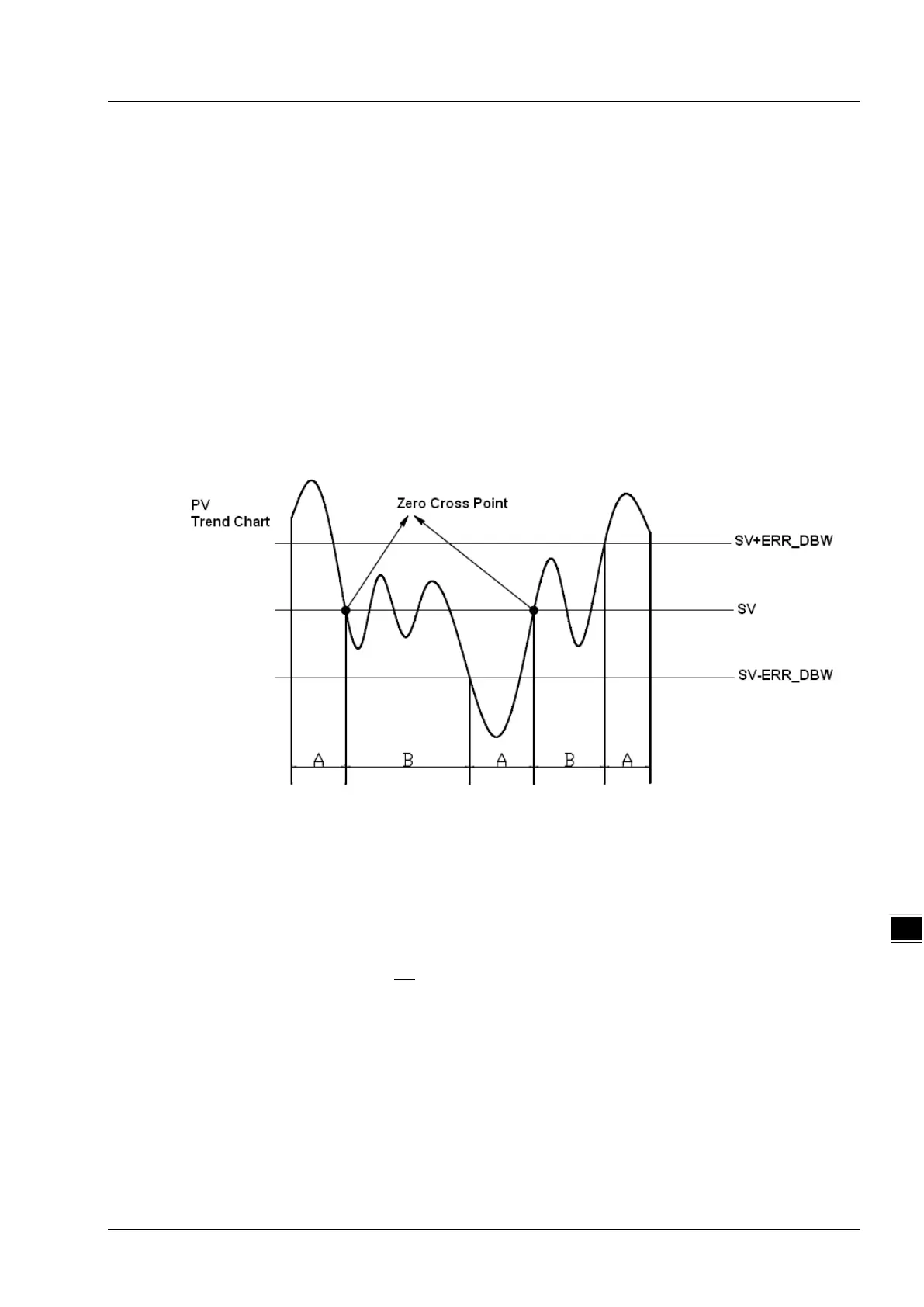
When the PV value is in the range of ERR_DBW, at the beginning, the present error will be brought
into the PID operation according to the normal processing and then the PLC module will check
whether the present error meets the cross status condition: PV (process value) passes by the SV
(target value). Once the condition is met, the present error will be counted as 0 for the PID operation.
And after the PV value is out of the ERR_DBW range, the present error will be brought into the PID
operation again.
If PID_DE is TRUE, that means using the the PV value to calculate the control value of the derivative
and after the cross status condition is met, the PLC will treat Δ PV as 0 to implement the PID operation.
(Δ PV= current PV – previous PV). As the example shown below, the present error will be brought
into the PID opeation according to the normal processing in the section A and the present error or Δ
PV will be counted as 0 to implement the PID operation in the section B.
PID Algorithm:
When PID_MODE is set to 0, the PID control mode is the automatic control mode
Independent Formula & Derivative of E( PID_EQ=False &
PID_DE=False)
BIAS
dt
dE
KdtEKiEKMV
d
t
P
+++=
∫
*
0
E = SV – PV or E = PV – SV
When PID_MODE is set to 1, the PID control mode is the automatic tuning mode. After the
tuning of the parameter is completed, PID_MODE becomes 0 automatically and the PID control
mode becomes the automatic control mode
 Loading...
Loading...









