Chapter 11 Motion Control Instructions
11-13
Programming Example 3
The example of Vel_BM =1
When the value of Buffermode is set to 1 and Enable changes from TRUE to FALSE, there will be no
change in Status of MC_Power unless the axis stops moving. When the axis stops moving, the axis will
enter the Standstill state first and one cycle later, it will go to the Disabled state.
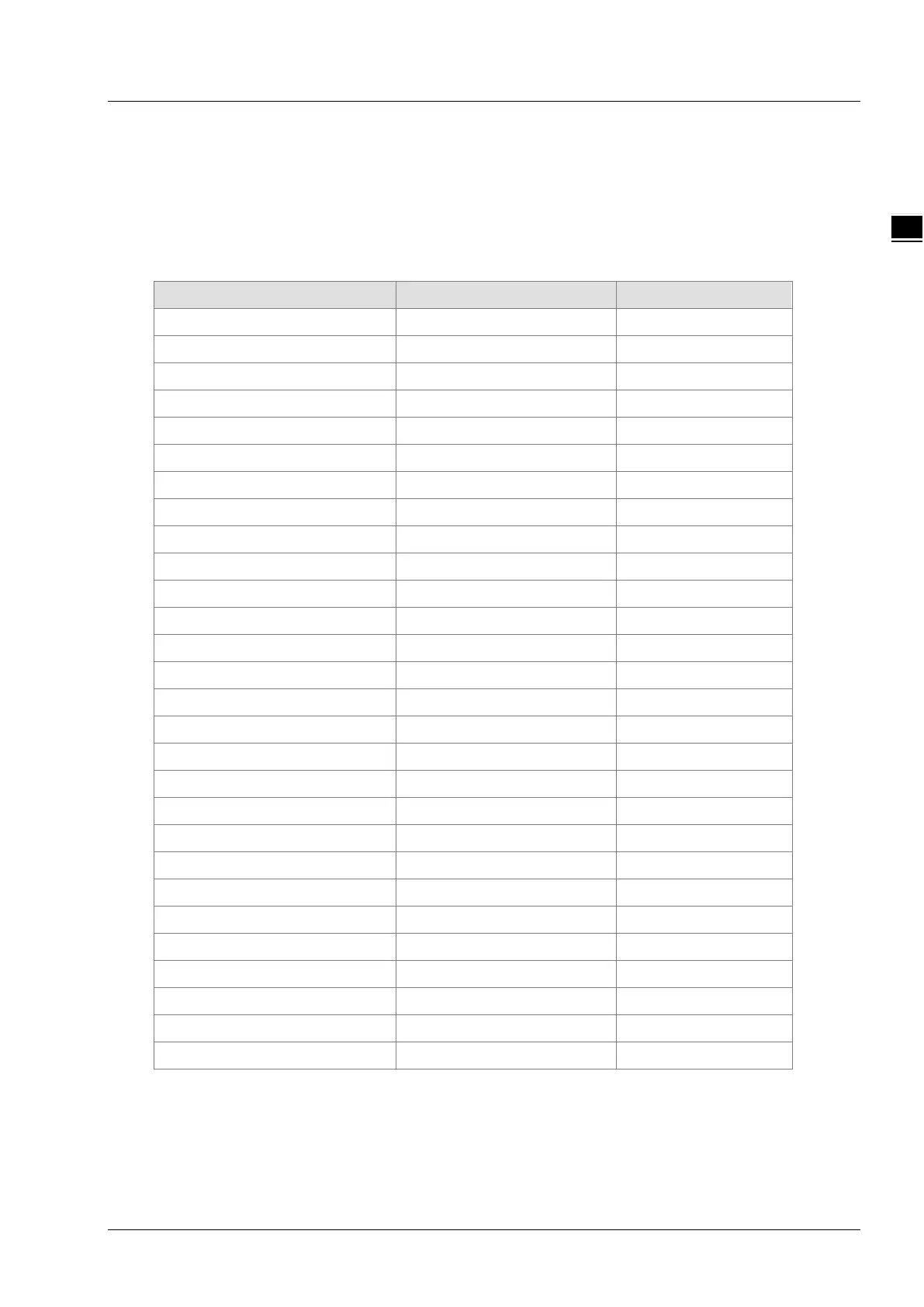
1. The variables and program
Variable name Data type Initial value
Pwr MC_Power
Axis1 USINT 1
Pwr_En BOOL FALSE
Pwr_EnPs BOOL FALSE
Pwr_BM MC_Buffer_Mode 0
Pwr_Sta BOOL
Pwr_Bsy BOOL
Pwr_Act BOOL
Pwr_Err BOOL
Pwr_ErrID WORD
Vel MC_MoveVelocity
Vel _Ex BOOL FALSE
Vel _Dir MC_DIRECTION 1
Vel _BM MC_Buffer_Mode 0
Vel _Invel BOOL
Vel _Bsy BOOL
Vel _Act BOOL
Vel _Abt BOOL
Vel _Err BOOL
Vel _ErrID WORD
Stp MC_Stop
Stp _Ex BOOL FALSE
Stp _Done BOOL
Stp _Bsy BOOL
Stp _Act BOOL
Stp _Abt BOOL
Stp _Err BOOL
Stp _ErrID WORD

 Loading...
Loading...








