Chapter 11 Motion Control Instructions
11-87
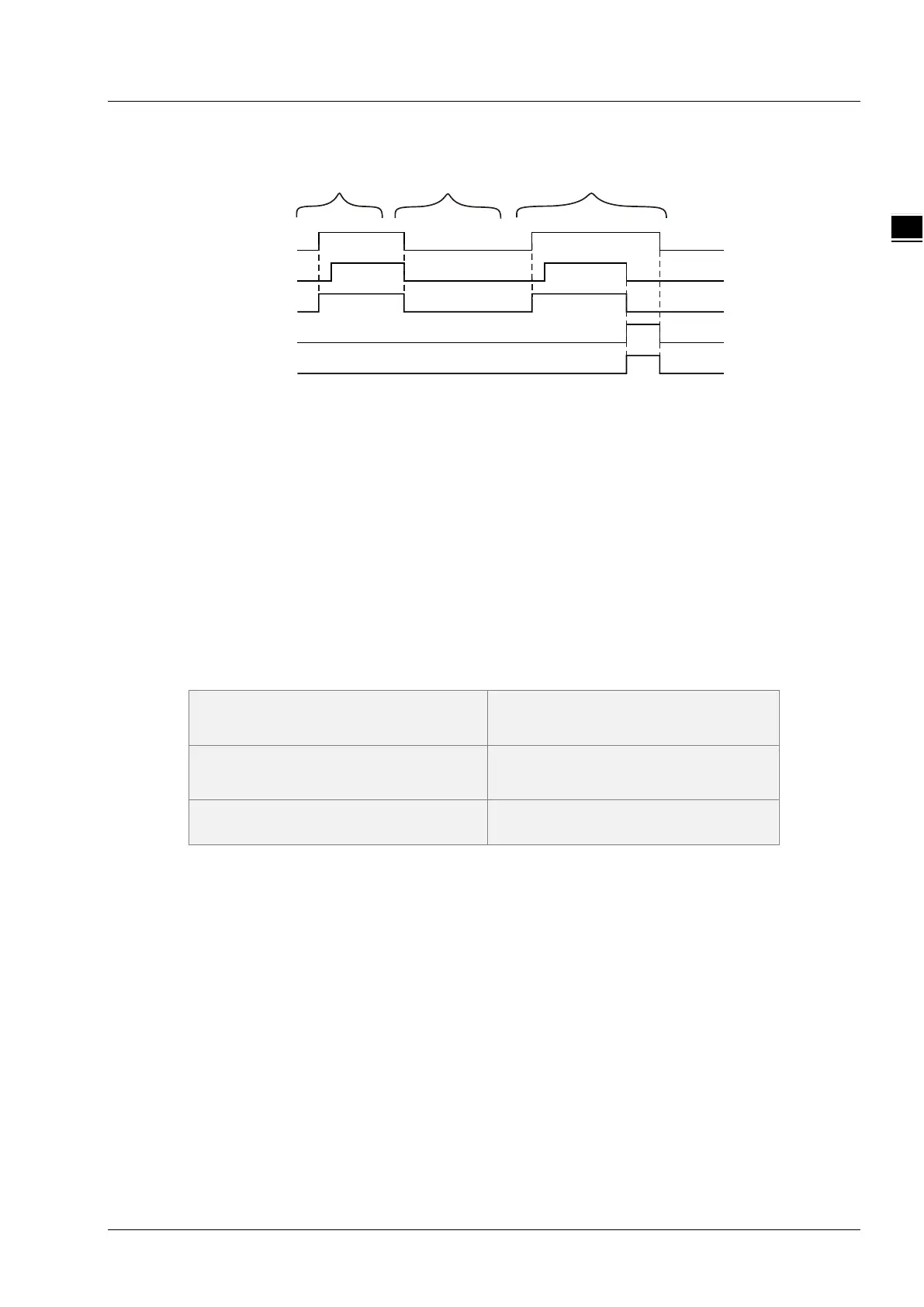
Output Update Timing Chart
Case 1: When Enable changes from FALSE to TRUE, Busy changes to TRUE. Enabled changes to
TRUE when the instruction execution is completed.
Case 2: When Enable changes from TRUE to FALSE, Enabled and Busy change to FALSE.
Case 3: When an error occurs after Enable changes from FALSE to TRUE, Error changes to TRUE
and ErrorID shows corresponding error code. Meanwhile, Enabled and Busy change to
FALSE. Error changes to FALSE when Enable changes from TRUE to FALSE.
Function
MC_SetOverride changes the target velocity for an axis.
1. If the target velocities of motion instructions are to be modified, use the MC_SetOverride
instruction. Therefore, the instruction has no influence on the instructions without target velocities.
However, Enabled remains TRUE even if the Enable of MC_SetOverride instruction is set to TRUE
for the instructions which are not affected by MC_SetOverride.
2. The instructions of which the target velocities can be modified by MC_SetOverride are shown in the
following table.
MC_MoveAbsolute(Absolute
positioning)
MC_MoveRelative(Relative
positioning)
MC_MoveAdditive(Additive
positioning)
MC_MoveVelocity(Velocity
instruction)
(Superimposed positioning)
3. The new target velocity is calculated as below.
The new target velocity after modification= Target velocity of currently executed instruction x
Velocity override factor
4. The unit of VelFactor is %. “100” indicates “100%”. The valid range of VelFactor is between 0 and
500. An error will occur if the MC_SetOverride instruction is executed when VelFactor value
exceeds the valid range.
5. The axis will speed up or down till the target velocity after modification is reached according to
Acceleration or Deceleration of the currently executed instruction.
6. An error will occur when the target velocity after modification exceeds the maximum velocity in axis
parameters.
7. If VelFactor value is set to 0, the target velocity changes to 0, the axis decelerates till the velocity is
0. If the axis operation state need be kept and axis operation need pause, set VelFactor value to 0.
At the moment, the axis state will not change.
8. When motion instructions are executed or buffered, the VelFactor value can be modified to set the
new target velocity.
9. If VelFactor value is modified when Enable is TRUE, the value will be effective immediately without
restarting the MC_SetOverride instruction.
Enable
Enabled
Busy
Error
Case 1
Error ID
Case 2
Case 3

 Loading...
Loading...








