Chapter 11 Motion Control Instructions
11-105
2. When Enable changes from TRUE to FALSE, Valid, Busy and Error change to FALSE, meanwhile
ErrorID changes to 0 and the outputs of ErrorStop, Disabled, Stopping, Homing, Standstill,
DiscreteMotion, ContinuousMotion and SyncMotion keep the status as Enable is TRUE.
Output Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Valid
When Enable changes to
TRUE
When Enable changes from TRUE
to FALSE
When Error changes from FALSE to
TRUE
Busy
When Enable changes to
TRUE
When Enable changes from TRUE
to FALSE
When Error changes from FALSE to
Error
When an error occurs in the
instruction execution or the
input parameters for the
instruction are illegal
When Enable changes from TRUE
to FALSE
ErrorStop
ErrorStop state
When the axis is not in ErrorStop
state
Disabled
When the axis enters Disabled
state
When the axis is not in Disabled
state
Stopping
When the axis enters Stopping
state
When the axis is not in Stopping
state
Homing
When the axis enters Homing
state
When the axis is not in Homing
state
Standstill
Standstill state
When the axis is not in Standstill
DiscreteMotion
DiscreteMotion state
DiscreteMotion state
ContinuousMotion
When the axis enters
ContinuousMotion state
When the axis is not in
ContinuousMotion state
SyncMotion
When the axis enters
SyncMotion state
When the axis is not in SyncMotion
state
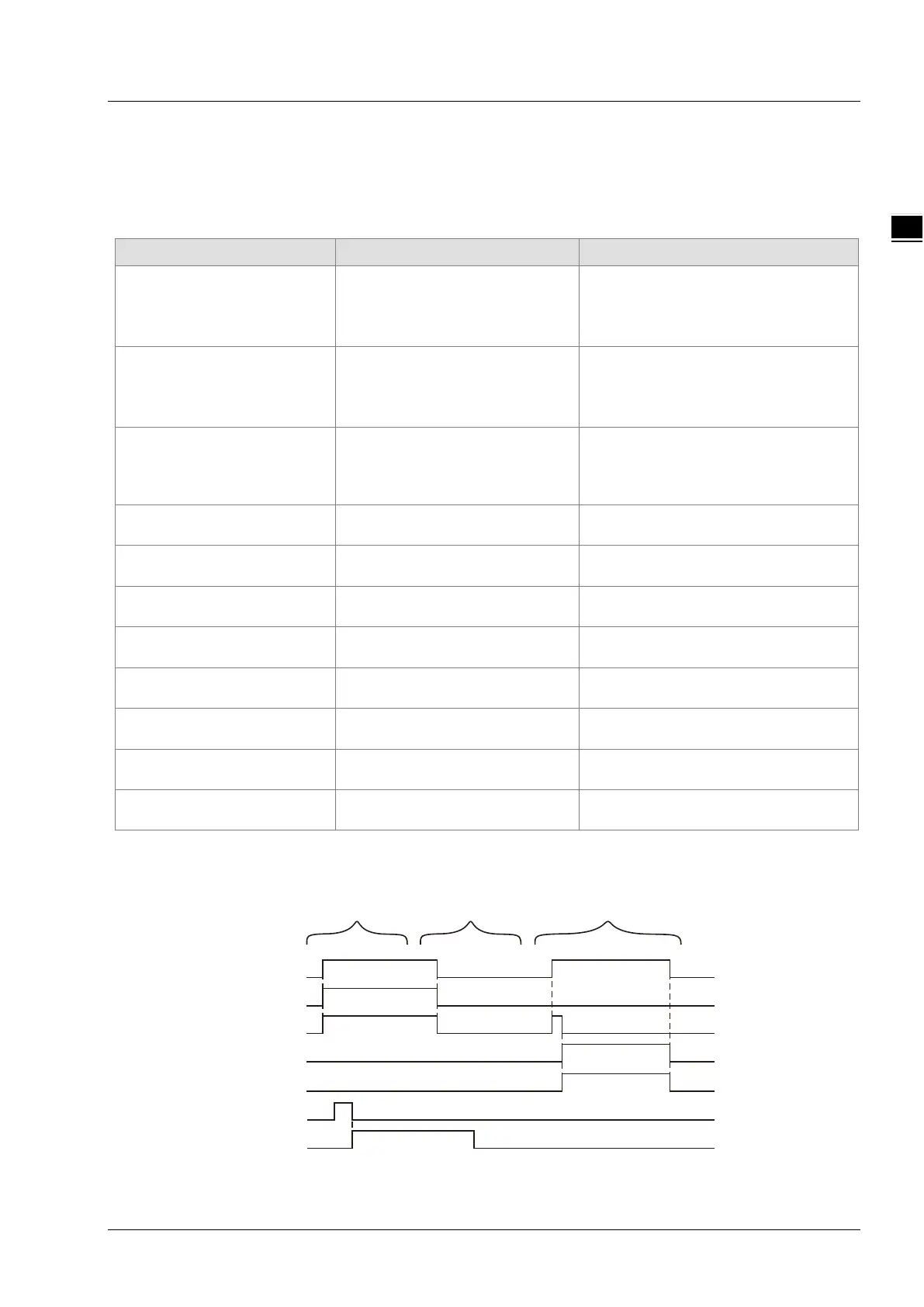
Output Update Timing Chart
Enable
Valid
Busy
Error
Disabled
Standstill
Case1
ErrorID
Case2
Case3

 Loading...
Loading...








