Chapter 11 Motion Control Instructions
11-115
Index = Servo drive parameter (Hex) + 2000 (Hex)
Subindex = 0.
Example: Calculation of the index of the servo parameter P6-10: 2000 + 060A (the hex. expression of
P6-10) = 260A, subindex = 0.
2. For the index and subindex of other slave parameters, refer to the product manual related to CANopen
function.
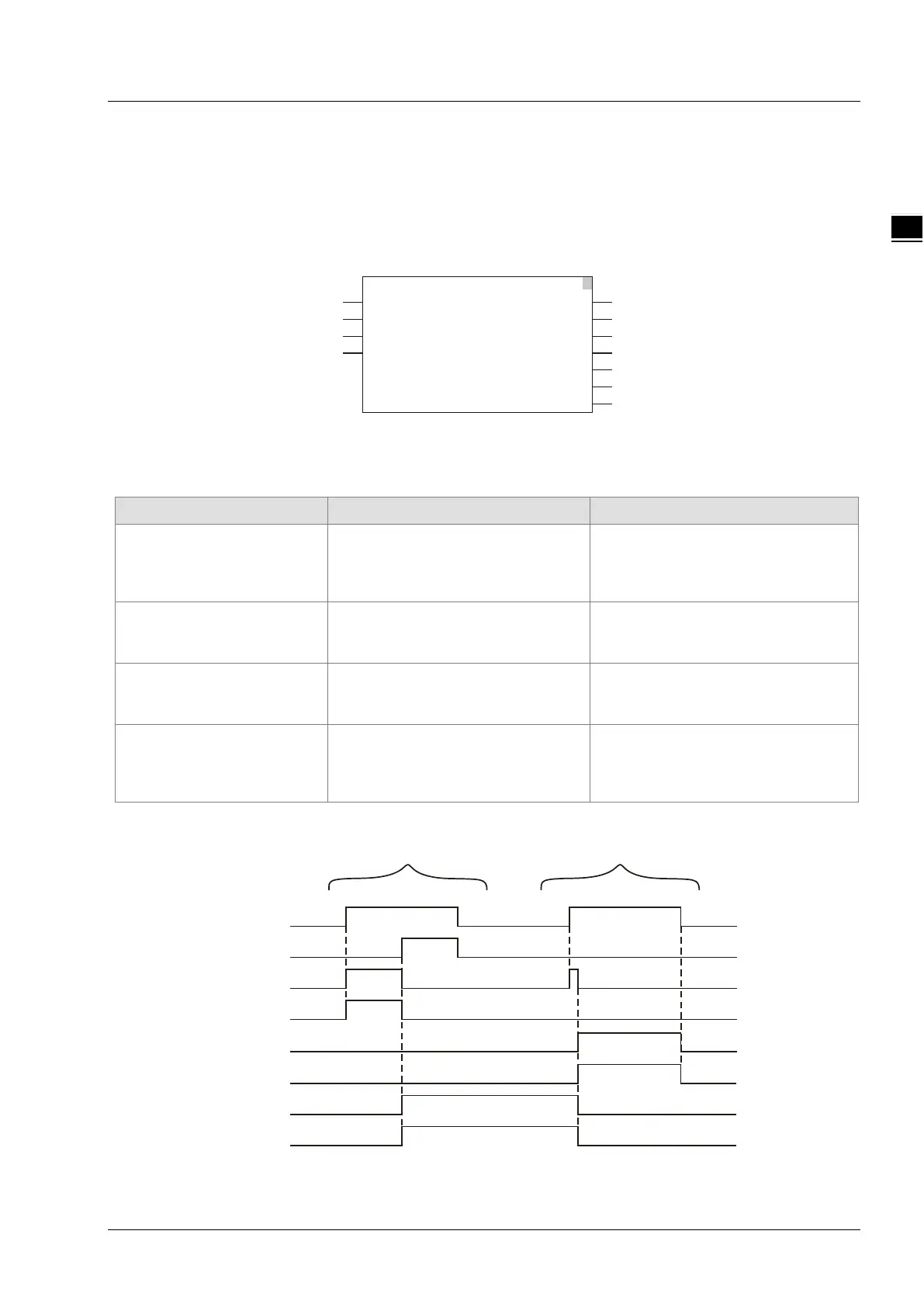
Output Update Timing
Parameter Name Timing for changing to TRUE Timing for changing to FALSE
Done
When the reading is completed.
Execute
TRUE to FALSE after the
instruction execution is
Busy
When Execute changes to
TRUE.
When Error changes to TRUE.
When Done changes from FALSE
Active
When the instruction starts to
control the axis.
When Error changes to TRUE.
When Done changes from FALSE
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
When Execute changes from
TRUE to FALSE.
Output Update Timing Chart
1
ReadPm_M_Bsy
ReadPm_M_Act
ReadPm_M_Err
ReadPm_M_ErrID
ReadPm_M_DaTy
ReadPm_M_Done
ReadPm_M_Dat
0
16#260A
Axis1
ReadPm_M_Ex
DMC_ReadParameter_Motion
Axis Done
ReadPm_M
Execute Busy
Active
Error
ErrorID
DataType
Data
Index
SubIndex
Execute
Done
Busy
Active
Error
ErrorID
Case 1
DataType
Case 2
Data

 Loading...
Loading...








