DVP-15MC Series Motion Controller Operation Manual
11-152
Function Data type Valid range
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2.
WORD
Output Update Timing
Name Timing for changing to TRUE Timing for changing to FALSE
Done
When the instruction
execution is completed.
When Error changes to TRUE.
When Execute changes to FALSE.
Busy
Execute
When Error changes to TRUE.
Error
When an error occurs in the
instruction execution or the
input parameters for the
When Execute changes from TRUE to FALSE.
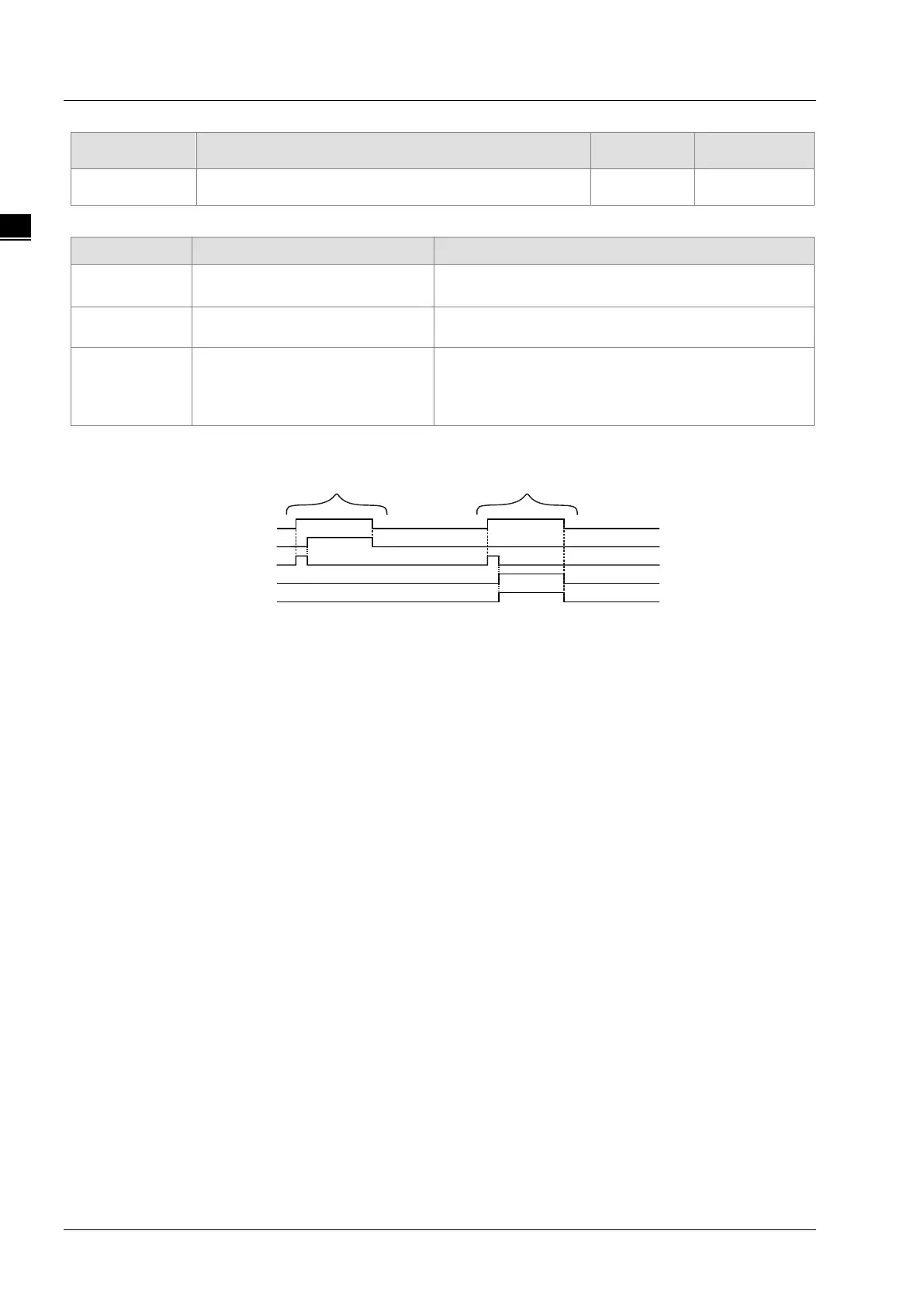
Output Update Timing Chart
Execute
Done
Busy
Error
Error I D
Case 1 Case 2
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. When the instruction
execution is completed, Done changes to TRUE and Busy changes to FALSE. When Execute
changes to FALSE, Done changes to FALSE.
Case 2: When an error occurs, Error changes to TRUE and ErrorID shows corresponding error code.
When Execute changes from TRUE to FALSE, Error changes to FALSE and the value of
ErrorID is cleared to 0.
Function
DMC_ChangeMechanismGearRatio is used for modifying parameter values for the terminal actuator.
The instruction can change axis parameter values so as to make them consistent with actual
parameter values, which is more convenient for users to operate.
The instruction can be executed only when the axis is in Disabled or Standstill state.

 Loading...
Loading...








