DVP-15MC Series Motion Controller Operation Manual
11-154
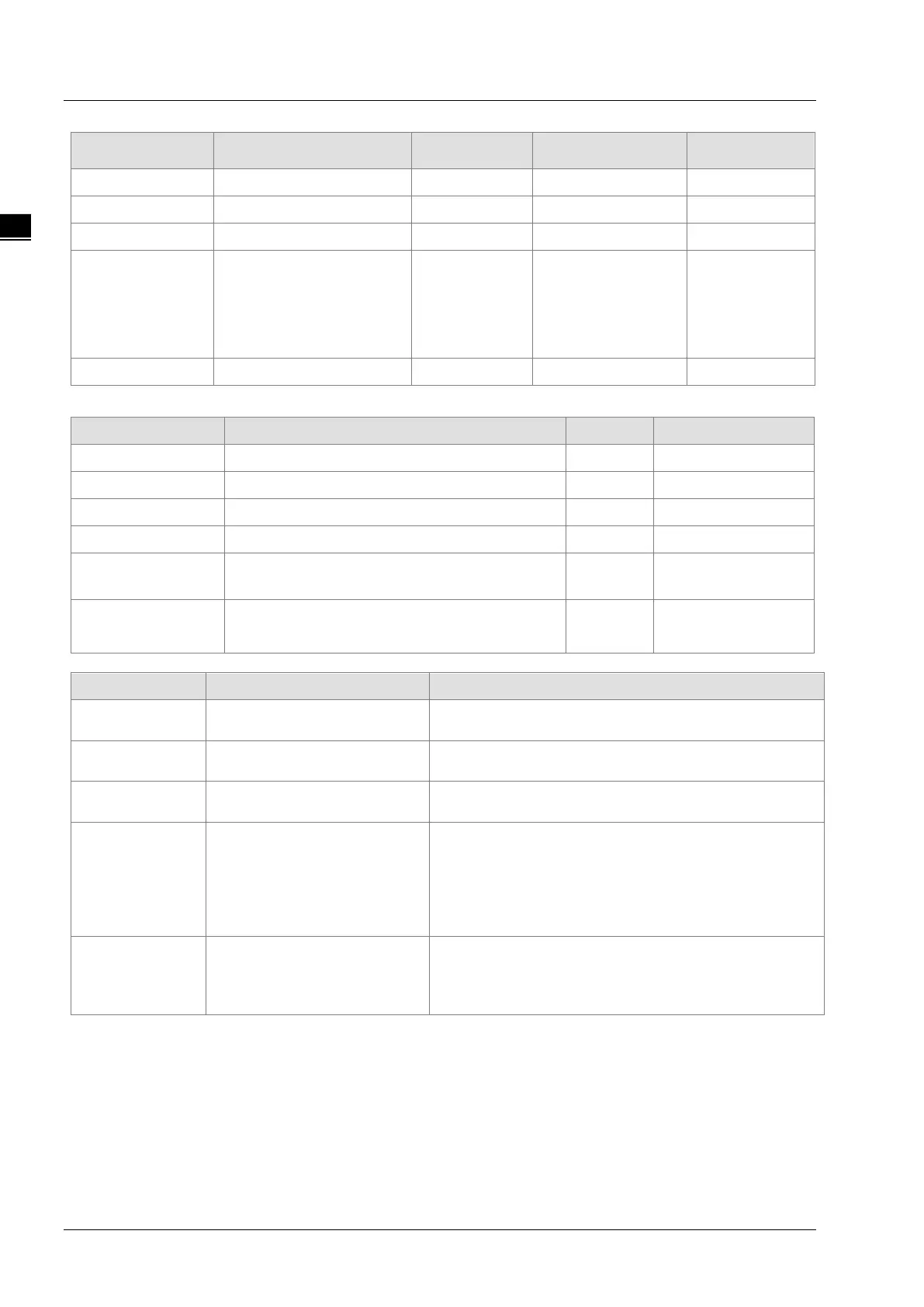
Parameter name Function Data type
Acceleration Reserved
Deceleration Reserved
Jerk Reserved
Direction
Specify the rotation
direction for the axis.
1: Positive direction
3: Negative direction
MC_Direction
tion,
3: mcNegativeDirec-
tion
(The variable value
When Enable
changes from
FALSE to TRUE.
BufferMode Reserved
Output Parameters
Parameter name Function Data type Valid range
InTorque TRUE when the set target torque is reached. BOOL TRUE / FALSE
Busy TRUE when the instruction is being executed. BOOL TRUE / FALSE
Active TRUE when the axis is being controlled. BOOL TRUE / FALSE
CommandAborted TRUE when the instruction is aborted. BOOL TRUE / FALSE
Error
TRUE when an error occurs in execution of the
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs.
Please refer to section 12.2 for the
WORD
Output Update Timing
Name Timing for changing to TRUE
Timing for changing to FALSE
InTorque
When the target torque is
reached.
When Error changes to TRUE.
When Enable changes from TRUE to FALSE.
Busy
TRUE.
When InTorque changes to TRUE.
When Error changes to TRUE.
Active
When the instruction starts
to control the axis.
InTorque
When Error changes to TRUE.
CommandAborted
execution is aborted by
other motion control
instruction.
When Enable changes from TRUE to FALSE.
CommandAborted is set to TRUE when the
instruction is aborted by other instruction after
Enable changes from TRUE to FALSE during the
instruction execution. One cycle later,
CommandAborted changes to FALSE.
Error
When an error occurs in the
instruction execution or the
input parameters for the
instruction are illegal.
When Enable changes from TRUE to FALSE.

 Loading...
Loading...








