Chapter 11 Motion Control Instructions
11-307
Parameter name Function Data type
Validation timing
(0)
Output Parameters
Parameter name Function Data type Valid range
Done
TRUE when the instruction execution is
completed.
BOOL TRUE / FALSE
Busy
TRUE when the instruction is being
executed.
BOOL TRUE / FALSE
Error
TRUE when an error occurs in execution of
the instruction.
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error
occurs. Please refer to section 12.2.
WORD -
Output Update Timing
Name Timing for changing to TRUE
Timing for changing to FALSE
Done
When the setting is
completed.
When Execute changes from TRUE to FALSE after the
instruction execution is completed.
Busy
When Execute changes to
TRUE.
When Done changes to TRUE
When Error changes to TRUE
Error
When an input parameter is
illegal or an error occurs
during
the instruction
execution.
When Execute changes from TRUE to FALSE.
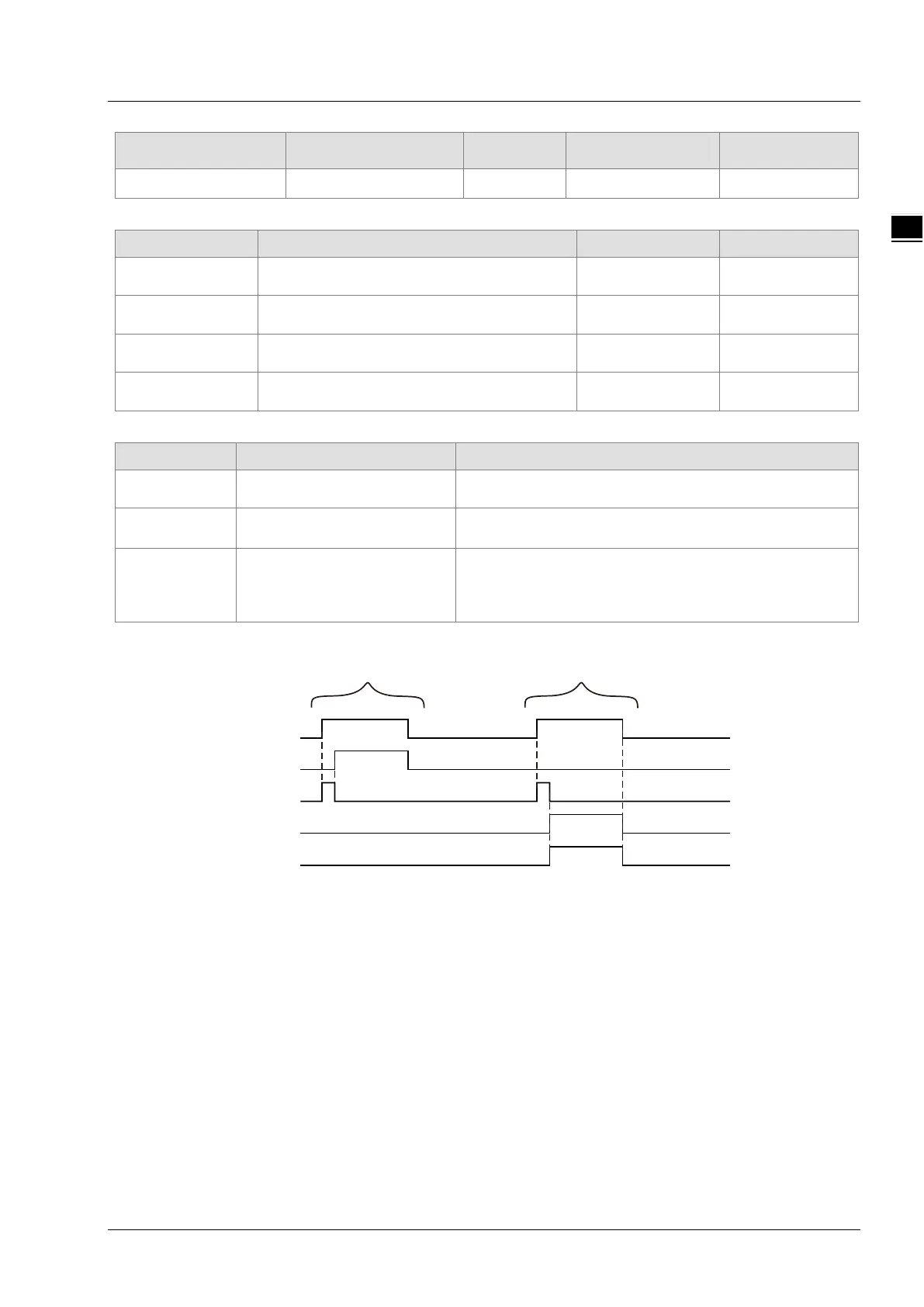
Output Update Timing Chart
Execute
Done
Busy
Error
Error ID
Case1 Case 2
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE and one cycle later,
Done changes to TRUE and Busy changes to FALSE.
Case 2: When an error occurs during the instruction execution, Error changes to TRUE and ErrorID
shows corresponding error code. Meanwhile, Busy changes to FALSE. Error changes to FALSE
when Execute changes from TRUE to FALSE.
Function
DMC_SetStartPosition instruction sets the start positions of 8 axes of G code. After the instruction is
executed, the motion begins from the start positions of X, Y, Z, A, B, C, P and Q axes specified by the
instruction. For example, the start position of X axis is set to 10000 and G code is G0 X1000. So if G
code is to be executed, for X axis, the motion will begin from the position 10000 and get to 1000. The
firmware of V1.01 and above supports the function.
The start positions need not be set with the instructon if the DMC_CartesianCoordinate instruction is
used to perform G code. The DMC_CartesianCoordinate instruction will set the start positions
automatically.

 Loading...
Loading...








