16. NAVIGATION SENSORS
16-11
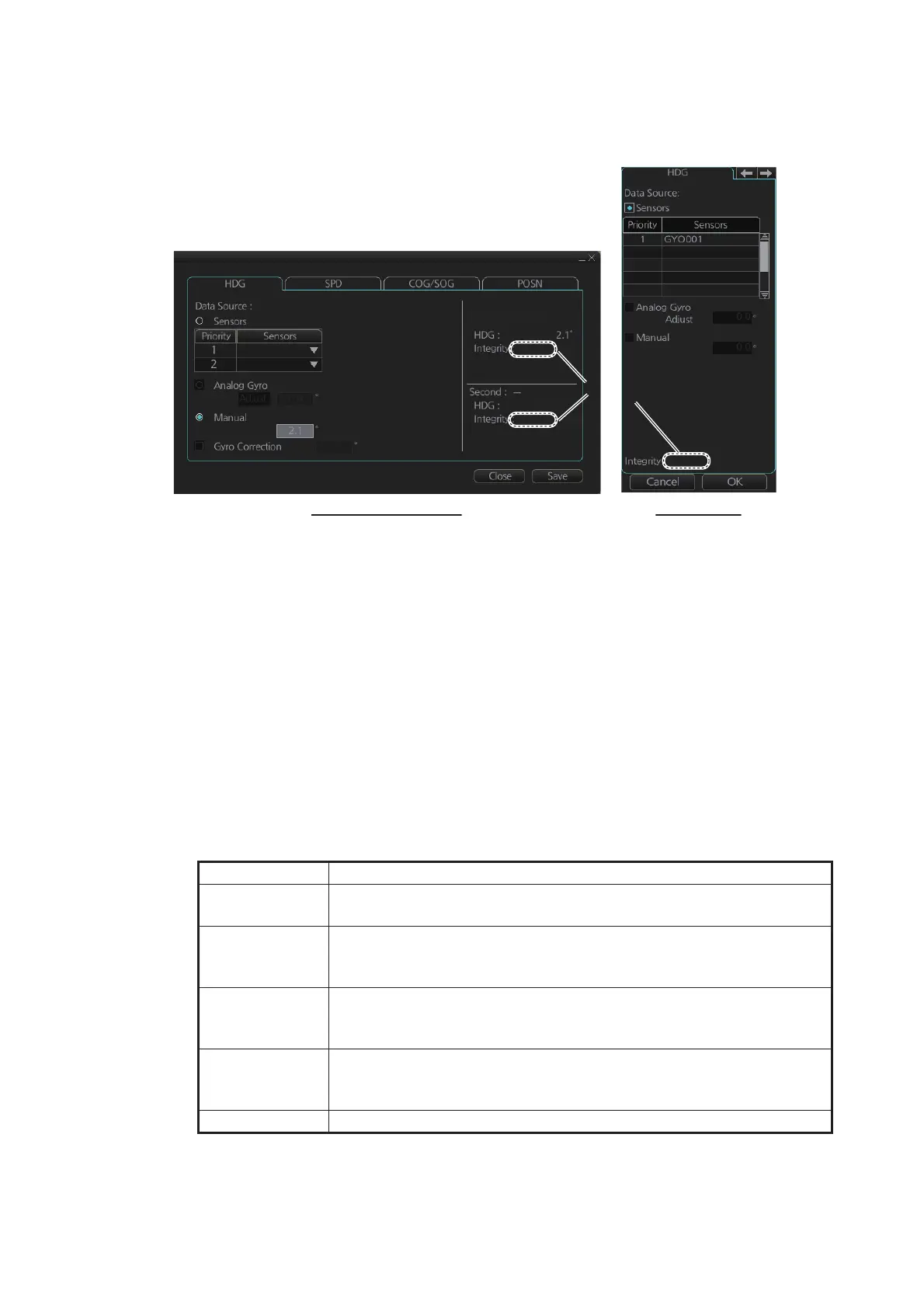
The integrity check result appears in the following locations:
• [Local Sensor Setting] and [System Sensor Setting] menus. The figure below shows
the result for the heading sensor GYRO1.
• [Filter Status] page in the [Other Sensor Setting] menu. See the next page.
Note: Depending on settings selected at installation, the integrity check result colors
can be changed.
[Passed]: Data is available for comparison and data is normal.
[Low Accuracy]: Data signal strength is low, but data is normal.
[Doubtful]: Data is not available for comparison, but data is normal.
[Failed]: Data is available (or not available) for comparison and data is abnormal.
[Excluded]: Value is greatly changed.
[Not Available]: Sentence is abnormal or improper.
For heading data, If there is only one gyro, the judgment is "Doubtful" when the ship
is stopped because there is no COG for comparison. When the ship begins to move,
the judgment is changed to "Passed" because there is COG for comparison.
The methods of integrity monitoring are outlined in the table below.
The status and integrity of all sensors can be monitored from the [Filter Status] page
in the [Other Sensor Settings] menu. Sensors can also be unselected and the filter re-
set from this page.
Sensor Comparison
Position • Comparison with other position sensors.
• Comparison with dead reckoning position.
Heading • Comparison with other heading sensors.
• Comparison with a COG sensor (used only if other heading sen-
sors are not available and if COG is high enough).
Speed over the
ground
• Comparison with other SOG sensors.
• Comparison with water speed sensors is a secondary option (used
only if other SOG sensors are not available).
Speed through
the water
• Comparison with other STW sensors.
• Comparison with STW sensors is a secondary option (used only if
other STW sensors are not available).
Rate of turn • Comparison with other rate of turn sensors.
2.1°
2.1°
GYRO1
GYRO2
PassedPassed
PassedPassed
PRIM: GYRO1
Integrity
check
result
Integrity
check
result
PassedPassed
Chart for Radar mode Radar mode