ENTERTAINMENT
09–20–21
09–20
GPS (GLOBAL POSITIONING SYSTEM) NAVIGATION OPERATION
CHU092066902S07
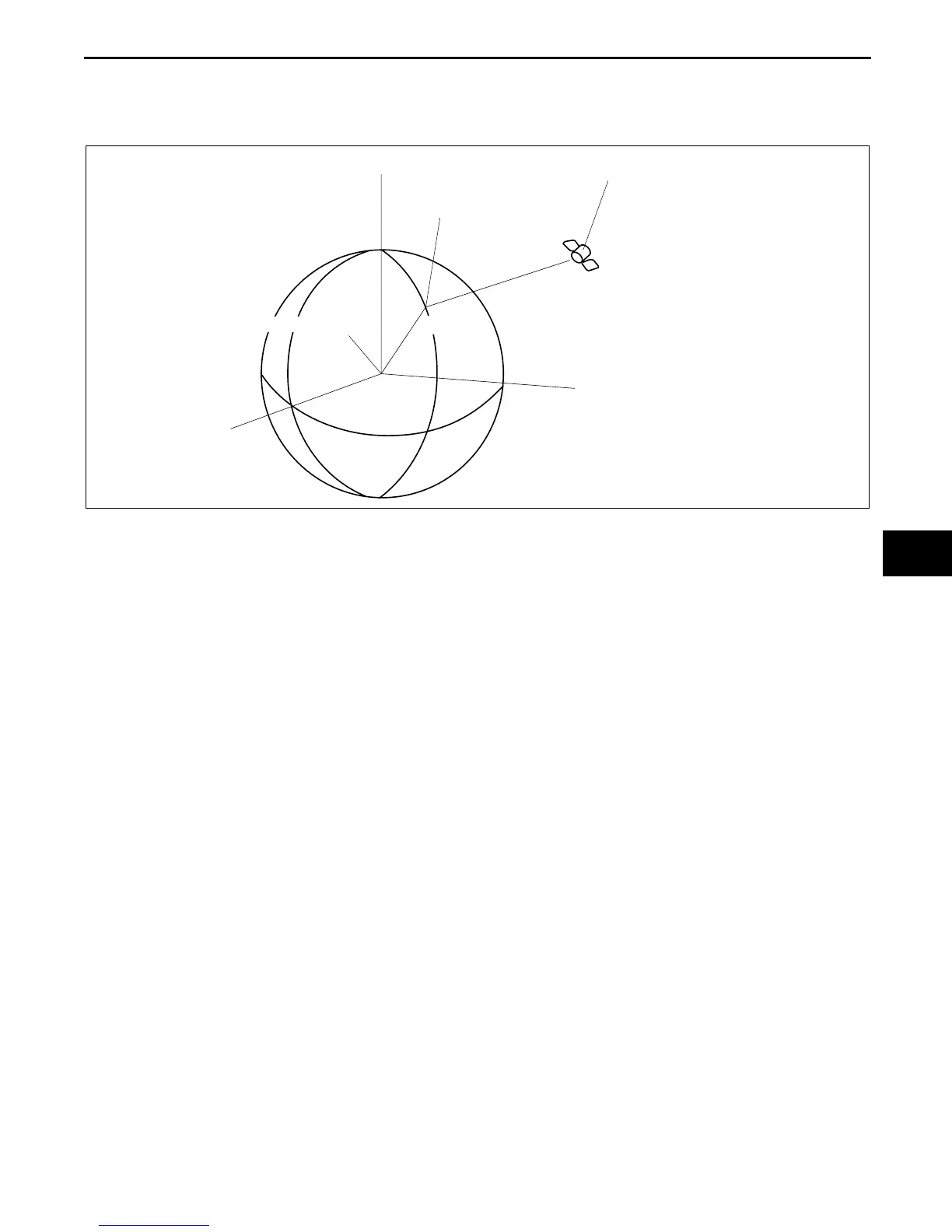
Principles of Measurement
• A vehicle's present position is defined as X
0
, Y
0
, and Z
0
, with the center of the earth being the point of
reference. A GPS satellite sends its position (X
1
, Y
1
, and Z
1
) and time T
1
when it sends the signal.
• The difference between time T
0
when the GPS antenna receives the signal and time T
1
when the GPS satellite
sends the signal is used to estimate distance between the vehicle and the satellite and is represented by the
following formula:
{C (T
0
- T
1
)}
2
= (X
1
- X
0
)
2
+ (Y
1
- Y
0
)
2
+ (Z
1
- Z
0
)
2
C: the speed of light
• The above formula represents a synchronized navigation unit clock with a GPS satellite clock. However, in fact
there is a difference of time T
2
between the GPS satellite and navigation unit clocks. The following formula
represents the relationship of time T
2
:
{C (T
0
- T
1
+ T
2
)}
2
= (X
1
- X
0
)
2
+ (Y
1
- Y
0
)
2
+ (Z
1
- Z
0
)
2
C: the speed of light
• Four GPS satellite signals producing four of the above formula are required to compute the vehicle's exact
position (X
0
, Y
0
, and Z
0
).
• The navigation unit computes three positions (latitude, longitude, and altitude) using radio signals from four or
more satellites, called three-dimensional positioning. The more GPS satellite signals received, the more
accurate the three-dimensional positioning is performed. The navigation unit can receive a maximum of eight
satellite signals to compute a vehicle's position.
• If only three satellite signals can be received, the navigation unit uses two positions (latitude and longitude) and
the altitude calculated while in three-dimensional positioning to compute a vehicle's position. This is called two-
dimensional positioning.
Note
• The GPS antenna may be unable to receive GPS satellite signals when a vehicle passes through tunnels,
valleys between tall buildings, or in the mountains.
• Placing an object above the GPS antenna may prevent the navigation unit from taking measurements.
• When GPS measurement conditions are bad, the navigation unit may be unable to compute dimensions
or correct to the proper direction.
• The position measurement error for GPS information can be reduced by reception conditions, the time
band, and by deliberate reduction in satellite accuracy by the United States Department of Defence. Also,
under the following conditions, interference with satellite signals may make it temporally impossible to
receive signals from GPS satellites.
— When receiving monitor channel 56 (UHF)
— When an automobile phone or cellular phone is used near the GPS antenna
• The navigation unit can locate absolute position only when the vehicle is in motion. Therefore, the
navigation unit does not correct position when the vehicle is not moving.
• Because two-dimensional positioning uses the altitude calculated in three-dimensional positioning,
accuracy of positioning may be lowered if the altitude changes.
• There can be as much as a 100-m {328 ft) +/- factor in the position detection system, even using the three-
dimensional positioning, which is highly accurate.
• The position detection system is affected by positions of the GPS satellites which send signals.
Y
Z
X
(X
0, Y0, Z0)
(X
1, Y1, Z1)
CENTER OF THE EARTH
POSITION OF THE VEHICLE
POSITION OF THE GPS SATELLITE
CHU0920S110