Appendix
A-4 Manual # 42-02-2P24
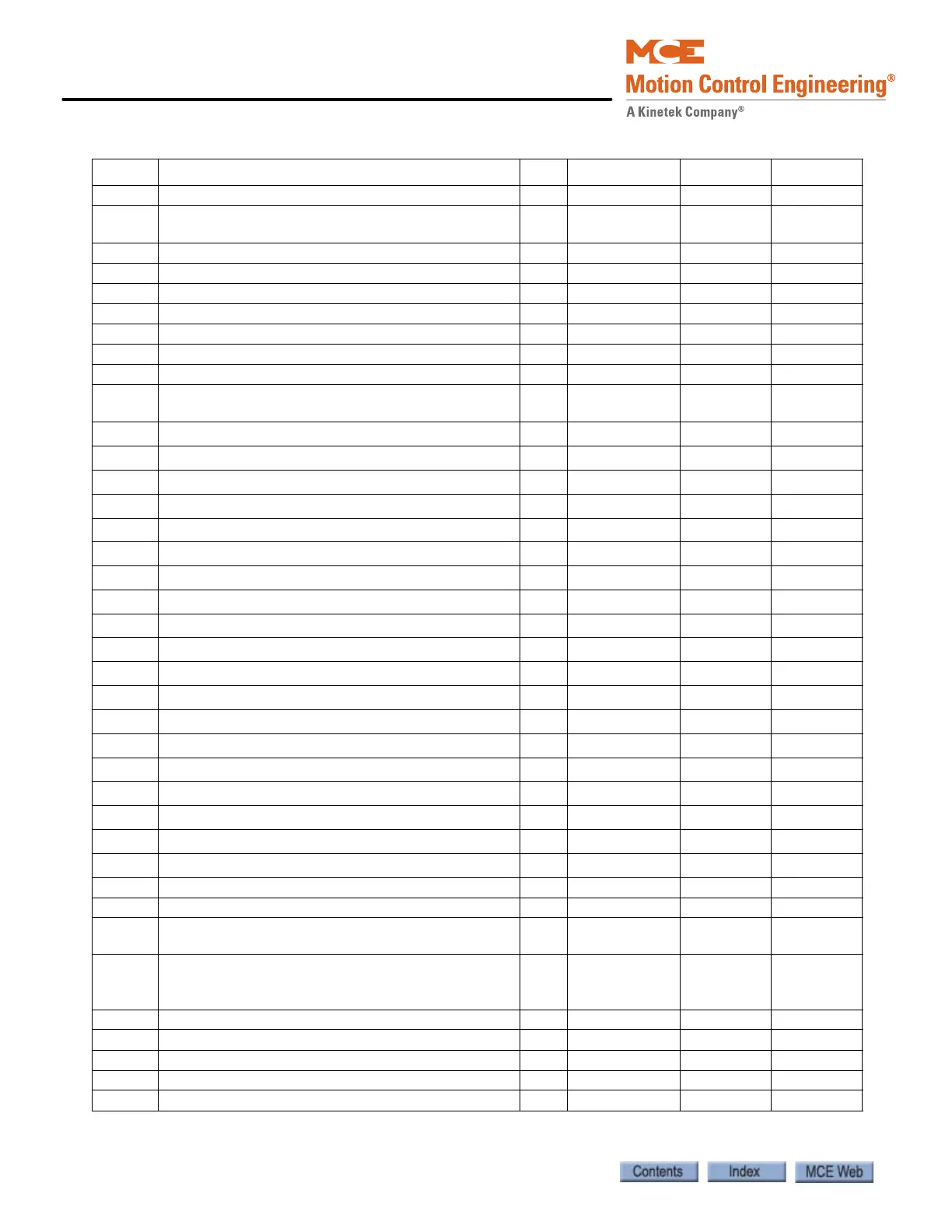
LF.37 Open loop torque boost: Open loop op. only % 0 - 25.5 5.0
LF.38 Carrier frequency; 0 = 8 KHz, 1 = 16KHz
(Note: set LF.38 = 0 if E.OL2 error on drive)
10, 1 0
LF.41 Leveling speed (Not used, must set to 0) fpm 0 - 25 0.0
LF.42 High speed (Not used, set from 0 to LF.20) fpm 0.0 - LF.20 0.0
LF.43 Inspection speed (Not used, must set to 0) fpm 0.0 - 150.00 0.0
LF.44 High leveling speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0
LF.45 Earthquake Speed (Not used, must set to 0) fpm 0.0 – 150.0 0.0
LF.46 Emergency Pwr Speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0
LF.47 Intermediate speed (Not used, must set to 0) fpm 0.0 - LF.20 0.0
LF.49 Over speed function Test (N/A for SW Version
1.61)
fpm 1- 2400 100
0.LF.50 Profile 0 - Starting jerk (not used)
ft/s
3
0.LF.51 Profile 0 - Acceleration (not used)
ft/s
2
0.LF.52 Profile 0 - Acceleration jerk (not used)
ft/s
3
0.LF.53 Profile 0 - Deceleration jerk (not used)
ft/s
3
0.LF.54 Profile 0 - Deceleration (not used)
ft/s
2
0.LF.55 Profile 0 - Approach jerk (not used)
ft/s
3
1.LF.50 Profile 1 - Starting Jerk (not used)
ft/s
3
1.LF.51 Profile 1 - Acceleration (not used)
ft/s
2
1.LF.52 Profile 1 - Acceleration jerk (not used)
ft/s
3
1.LF.53 Profile 1 - Deceleration jerk (not used)
ft/s
3
1.LF.54 Profile 1 - Deceleration (not used)
ft/s
2
1.LF.55 Profile 1 - Approach jerk (not used)
ft/s
3
2.LF.50 Profile 2 - Starting jerk (not used)
ft/s
3
2.LF.51 Profile 2 - Acceleration (not used)
ft/s
2
2.LF.52 Profile 2 - Acceleration jerk (not used)
ft/s
3
2.LF.53 Profile 2 - Deceleration jerk (not used)
ft/s
3
2.LF.54 Profile 2 - Deceleration (not used)
ft/s
2
2.LF.55 Profile 2 - Approach jerk (not used)
ft/s
3
LF.56 Stop jerk (not used)
ft/s
3
LF.57 Speed following error (0 = off, 1 = on,) 1 off, on 1
LF.58 Speed difference % 0 - 30 10
LF.59 Trigger time speed difference: Following error
timer
sec 0.0 -1.0 1.0
LF.61 Emergency operation mode. If using an MCE
TAPS, (Traction Auxiliary Power Supply), this must
be set to di1.
Off, SPd1,
SPd2, SPd3,
di1
off
LF.67 Pre-torque gain - 0.25 - 2.00 1.00
LF.68 Pre-torque offset % -100.0 - 100.0 0.00
LF.69 Pre-torque direction (0, 1 = +V, -1 = -V) 1 0, 1, -1 1
LF.70 Speed pick delay (Delay to turn on DRO) sec 0.0 - 3.0 0.30
LF.71 Brake pick delay sec 0.0 - 3.0 0.05
Table A.1 TorqMax F5 Parameters for Motion 4000
Display Parameter Description Unit Range Default Field