Automatic Operation (Position Control)
8-10
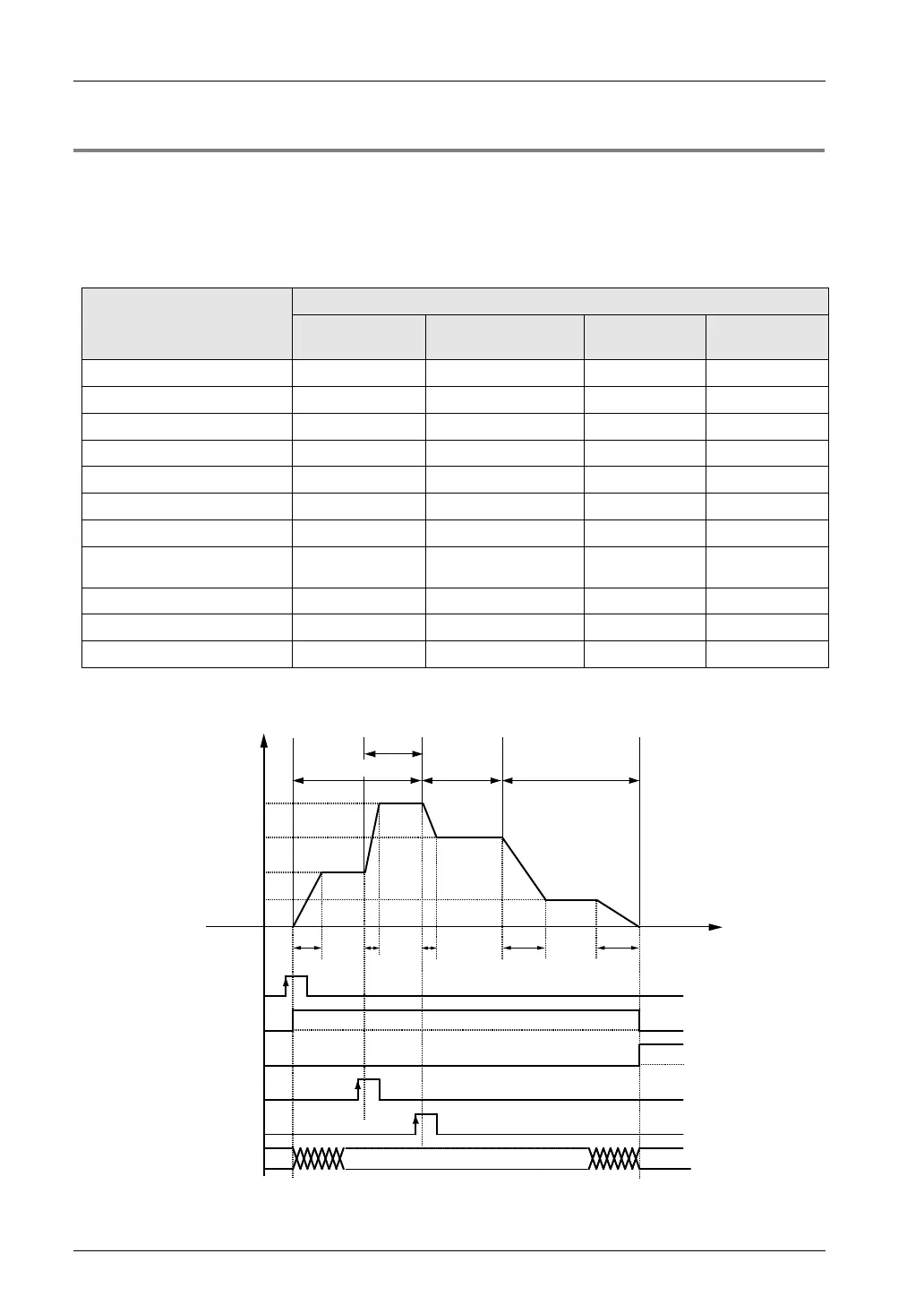
8.1.5 Setting and Operation of J-point Control
In the following example, a J-point control is performed by a single-axis control. The unit
operates at the target speed and J-point target speed until the J-point positioning start request
turns on (without depending on a set movement amount). The position control starts once the
J-point positioning start request turns on.
Settings
Item
Table 1
J-point axis
parameter setting
Table 2 Table 3
Operation pattern J: Speed point
-
P: Pass point E: End point
Control method I: Increment
-
I: Increment I: Increment
1st axis (L) movement amount 5000 pulses
-
10000 pulses 3000 pulses
Acceleration/deceleration type L: Linear
-
L: Linear L: Linear
Acceleration time (ms) 100 ms
-
200 ms 30 ms
Deceleration time (ms) 10 ms
-
20 ms 150 ms
Target speed 10000 pps
-
20000 pps 5000 pps
J-point operation setting code
-
Linear acceleration/
deceleration
- -
J-point acceleration time (ms)
-
10 ms
- -
J-point deceleration time (ms)
-
10 ms
- -
J-point target speed
-
30000 pps
- -
(Note): The (L) in the above table is an axis number.
Operation diagram
f [pps]
t [ms]
30000
20000
10000
5000
100
10
20
150 150
Positioning start request
J-point speed change request
J-point positioning start request
Operation done flag
Current value
BUSY flag
Table 1
J-point
parameter
Table 2 Table 3