Manual Operation
(Home Return)
11-6
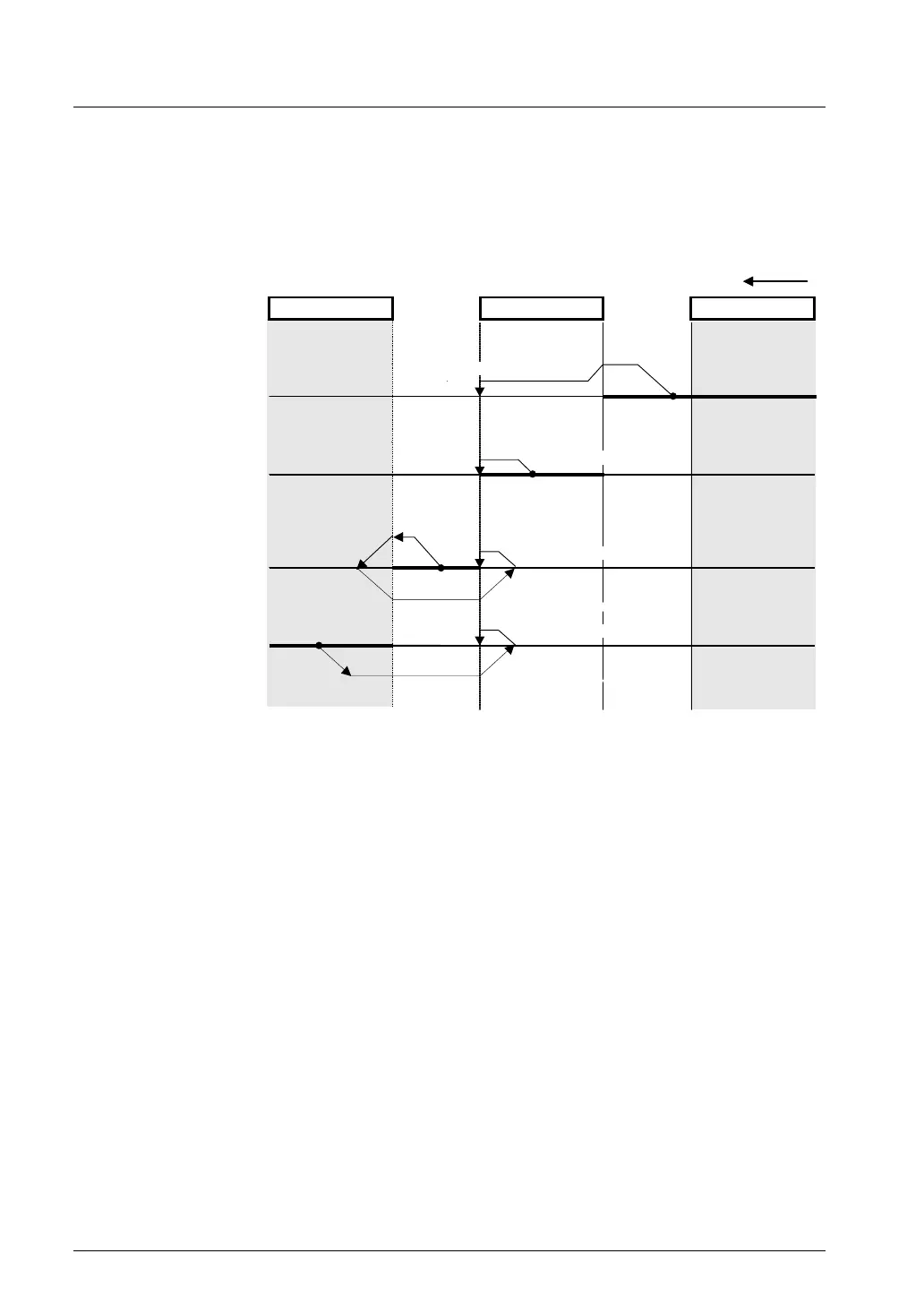
DOG method 4 (Based on back end)
• The trailing edge of a near home input (HOME) is detected and it is set as a home position.
• After the trailing edge of a near home input (HOME) is detected, the deceleration stop is
performed in the home return deceleration time. After reversing, the near home input
(HOME) is searched at a home return creep speed, and the operation stops at a detected
position.
Limit (-) input
Limit (+) inputNear home input
The starting point is
between the near home
input and limit (-) input.
The starting point is on the
near home input.
The starting point is on the
limit (-) input.
①
③
②
④
Home return creep speed
Home return creep speed
Home return creep speed
Target speed
Target speed
Target speed
Home return
deceleration time
Home return
deceleration time
Home return creep speed
The starting point is
between the near home
input and limit (+) input.
(including the starting point
on the limit (+) input)
Home return direction
Home return
deceleration time
This figure shows the case that the movement toward the home return direction is started.