Parameter Descriptions 2-193
7000-TD002A-EN-P – September 2007
PID Preload [PID Preload]
Linear Number: 365
Default Value: 0.0000 pu
Minimum Value: 0.0000 pu
Maximum Value: 2.0000 pu
Access Level: Advanced
Read/Write: Read/Write
This parameter specifies the preset value of PID Output (356).
PID Filter [PID Filter]
Linear Number: 390
Default Value: 0.0 r/s
Minimum Value: 0.0 r/s
Maximum Value: 6000.0 r/s
Access Level: Service
Read/Write: Read/Write
This parameter specifies the cutoff frequency of the low pass filter used for the error between the Process
Setpoint (360) and the Process Variable (357).
PID Command [PID Command]
Linear Number: 313
Default Value: 0000000000000000
Access Level: Service
Read/Write: Read/Write
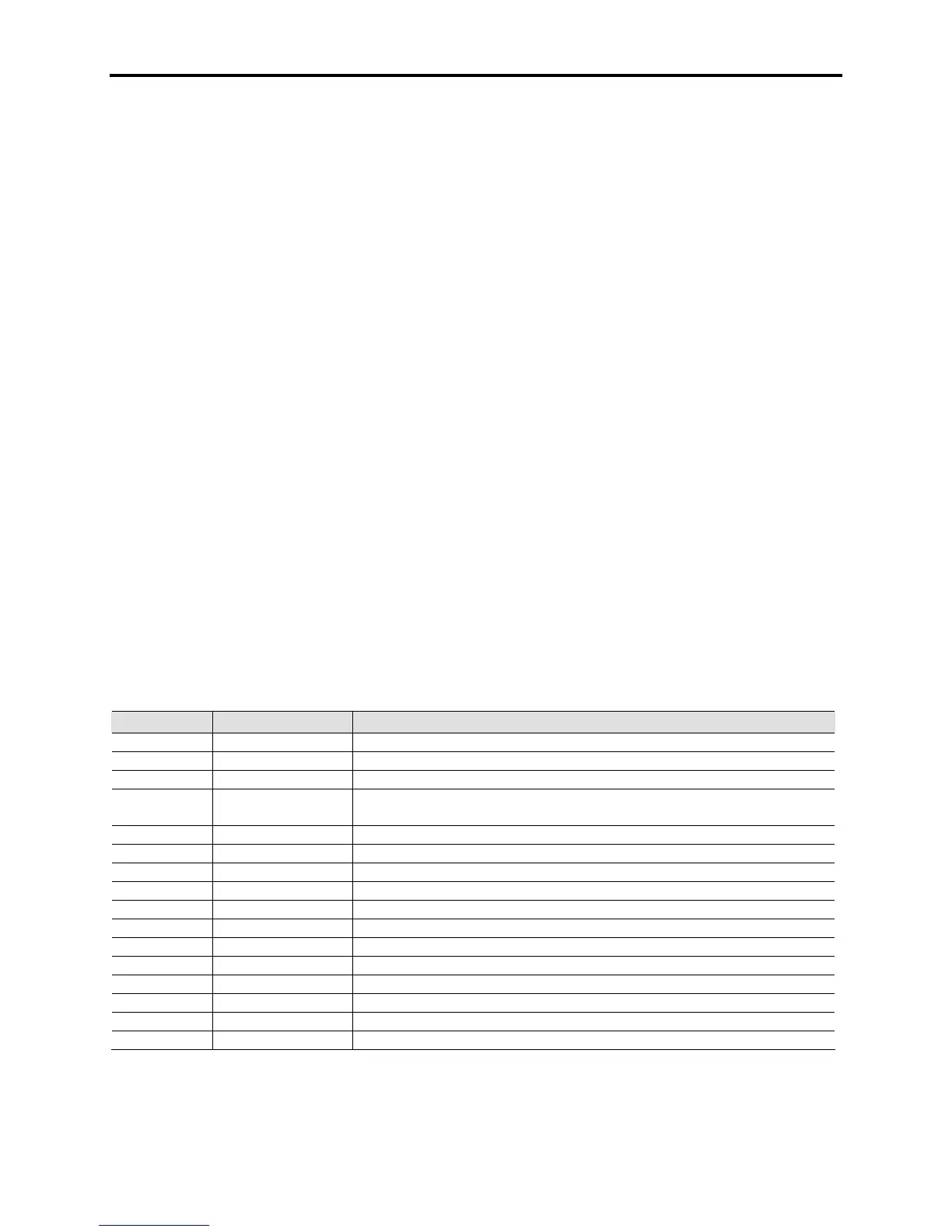
This parameter specifies the options for PID controller action. ‘1’ in the corresponding bit location
indicates that option is selected, and ‘0’ indicates that the option is not selected. When no option is
selected, PID controller works with the default setting, which is dependent gain with the derivative term on
the error. The following is descriptions of the individual bits:
Bit Enum Text Description
0 Indpndt Gain PID gain is applied only to the proportional term
1 DerivProcess Derivative term acts on the process variable, not on the error.
2 Manual PID Output is manually decided.
3 Direct PID Output increases when the Process variable is larger than the
PID Setpoint.
4 Unused
5 Unused
6 Unused
7 Unused
8 Unused
9 Unused
10 Unused
11 Unused
12 Unused
13 Unused
14 Unused
15 Unused

 Loading...
Loading...









