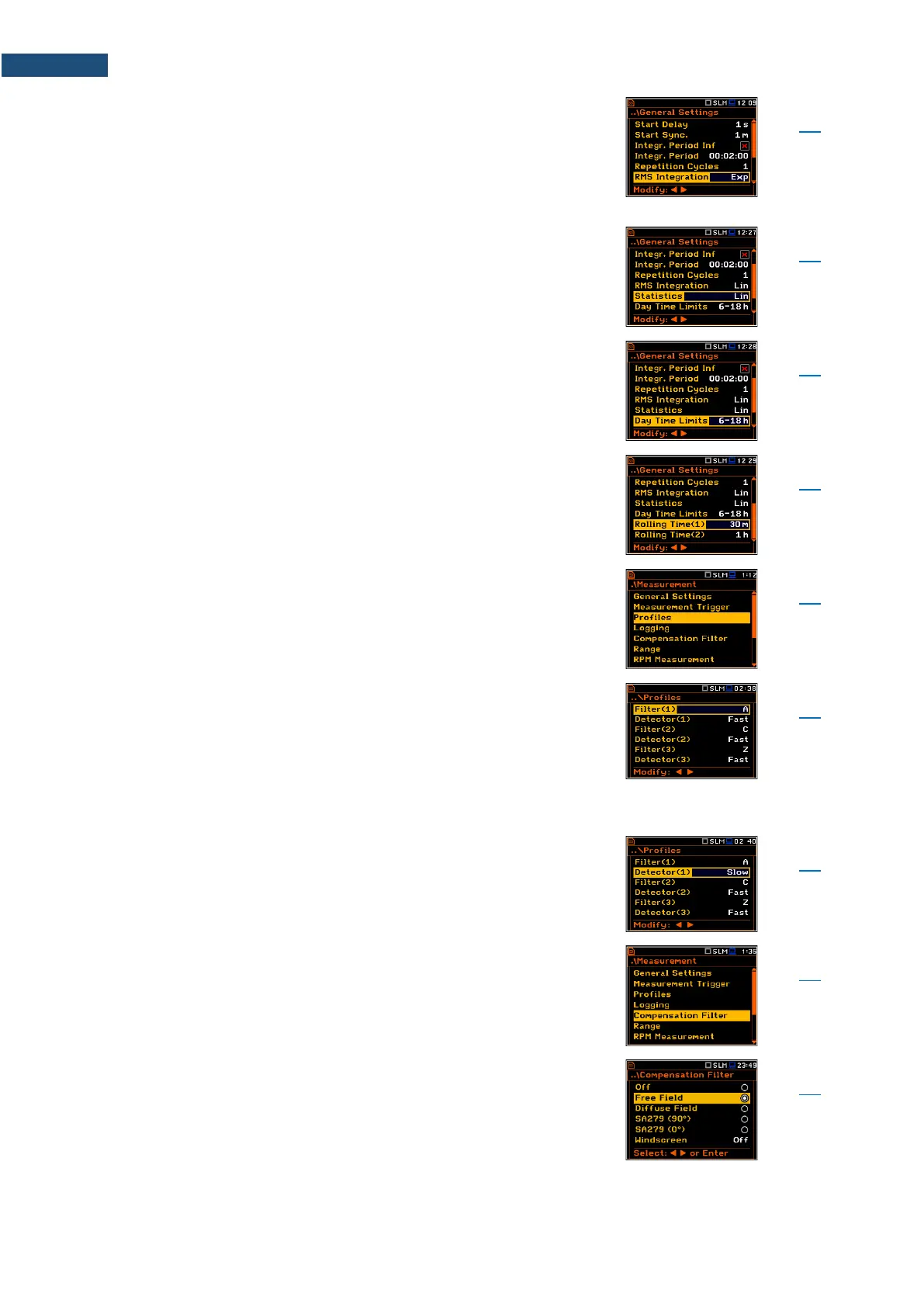
Exponential type of integration of RMS based results
(RMS detector), where averaging is a continuous
process that weighs current and past data differently.
The amount of weight given to past data as compared to
current data depends on the exponential time constant.
In the exponential averaging, the averaging process
continues indefinitely.
Method for calculation of statistics for RMS results: with
linear detector (Lin) or exponential detector (Exp), e.g.
Impulse, Fast or Slow time constant.
Definition of the day and night periods required by local
standards: 6–18h and 7–19h. These limits are used for
the calculation of the L(den) function.
Time frame for the "Rolling Leq" calculation. The Rolling
Leq is presented as LR+<time frame>. For example, if
the Rolling Time is equal to 30 minutes, the appropriate
result will be named as LR30 and calculated each
second as Leq integrated during last 30 minutes.
Virtual broadband level meters, which calculate the set
of results with own weighting filter (Filter) and exponential
detector time constant (Detector).
Weighting filter applied in the profile in accordance with
most applicable world standards:
- for sound measurements: Z, A, C, B, G,
- for vibration measurements:
o acceleration: HP, HP1, HP3, HP10, Wh,
o velocity: Vel1, Vel3, Vel10 and VelMF,
o displacement: Dil1, Dil3 and Dil10.
Chapter
4.3
Appendix C
Appendix D
Exponential RMS detector time constant applied in the
profile:
- Impulse, Fast or Slow for sound results like Leq, Lmax,
Lmin, SEL, LEPd, Lden, Spl, LTeq;
- from 100ms to 10s for vibration results like RMS, MAX.
Chapter
4.3
Appendix D
D.1.2
Digital filter that compensates some effect: Free Field,
Diffuse Field, Outdoor Environment, Outdoor Airport and
Windscreen.
Digital filter that compensates the free field effect.