www.dadehpardazan.ir 88594014-15
7 Utility Functions (Fn)
7-4
7.3 JOG Operation (Fn002)
JOG operation is used to check the operation of the servomotor under speed control without connecting the
SERVOPACK to the host controller.
(1) Preparation
The following conditions must be met to perform a jog operation.
• The write prohibited setting parameter (Fn010) mu
st be set to Write permitted (P.0000).
• The main circuit power supply must be ON.
• All alarms must be cleared.
• The hardwire baseblock (HWBB) must be disabled.
• The servo ON signal (/S-ON) must be OFF.
• The JOG speed must be set considering the operating range of the machine.
Set the jog speed in Pn383.
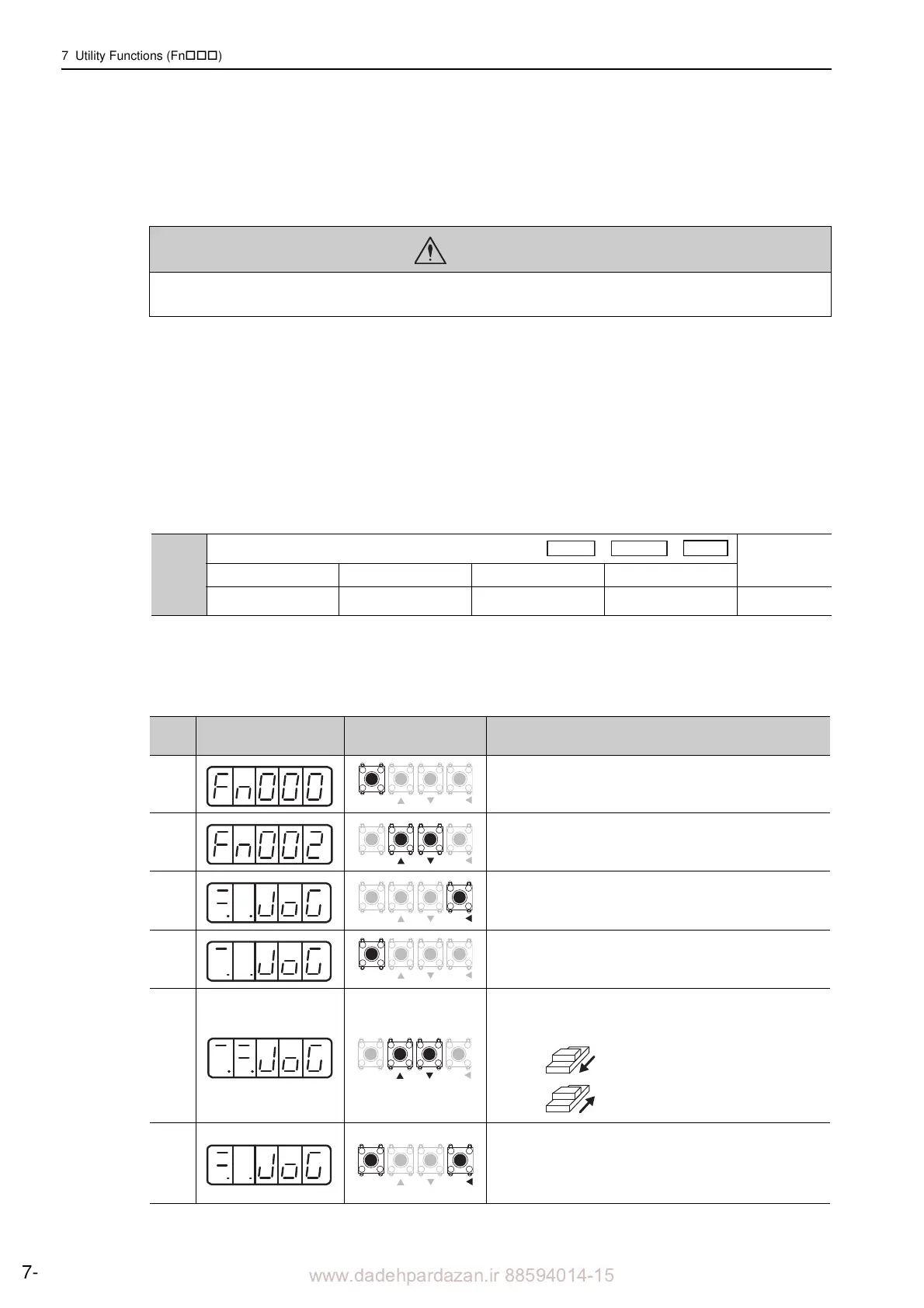
(2) Operating Procedure
Use the following procedure. The following example is given when the moving direction of servomotor is set
as Pn000.0=0 (linear scale counting up direction is regarded as the forward run).
CAUTION
• While the SERVOPACK is in JOG operation, the overtravel function will be disabled. Consider the operat-
ing range of the machine when performing JOG operation for the SERVOPACK.
Pn383
Jog Speed
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 10000 1 mm/s 50 Immediately
Setup
Step
Display after Opera-
tion
Keys Operation
1 Press the MODE/SET Key to select the utility function.
2 Press the UP or DOWN Key to select
Fn002.
3
Press the DATA/SHIFT Key for approximately on
e second.
The display shown on the left appears.
4
Press the MODE/SET Key to turn
the servomotor power
ON.
5
The servomotor will move
at the speed set in Pn383 while
the UP Key (for forward run) or DOWN Key (for reverse
run) is pressed.
6
Press the MODE/SET Key to turn
the servomotor power
OFF.
Note: The servomotor power can be turned OFF
by press-
ing the DATA/SHIFT Key for approximately one sec-
ond.
MODE
SET
DATA
MODE
SET
DATA
Motor forward run
Motor reverse run