www.dadehpardazan.ir 88594014-15
4.4 Trial Operation with the Servomotor Connected to the Machine
4-9
4.4 Trial Operation with the Servomotor Connected to the Machine
Perform the following steps for trial operation when the servomotor is connected to the machine.
The steps are specified on the condition that trial operation for servomotor without load has been completed in
each control
method.
WARNING
• Malfunctions that occur after the servomotor is connected to the machine may not only damage the
machine, but may also cause an accident resulting in death or injury.
Enable the overtravel signals (P-OT and N-OT) du
ring trial operation with the servomotor
connected to the machine to provide a protective function.
Step Operation Reference
1
Turn ON the control power and main circuit p
ower supplies and make the settings for
mechanical configuration related to protective function such as safety function, over-
travel, and brake.
When using the safety function, connect a safety
function device to CN8.
Note:
• When not using the safety function, use the
SERVOPACK with the safety function
jumper connector (JZSP-CVH05-E provided as an accessory) inserted into CN8. If
the SERVOPACK is used without the jumper connector inserted into CN8, no cur-
rent will flow to the servomotor an
d no force will be output. In this case, "Hbb"
will be displayed on the panel operator or the digital operator.
• When checking the operation of a brake installed on
the machine, take advance
measures to prevent vibration due to gravity acting on the machine or external
forces before checking the brake operation. Check that both servomotor and brake
operations are correct.
5.11 Safety Function
3.2.2 Safety Function Sig-
nal (CN8) Names and
Functions
5.2.4 Overtravel
5.2.5 Holding Brakes
2
Set the necessary parameters for
control method used. 5.3 Speed Control
5.4 Position Control
5.5 Force Control
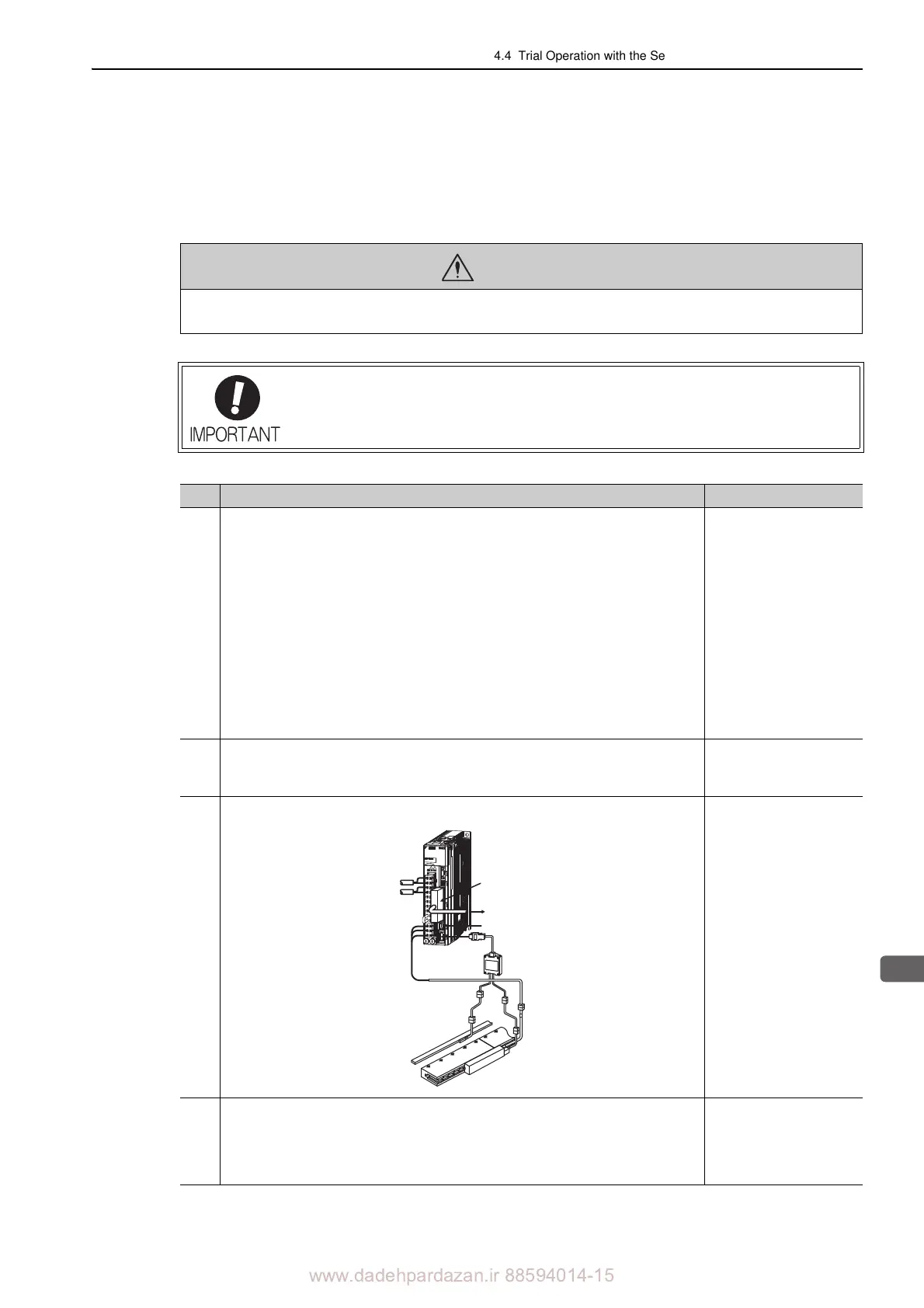
3
Connect the servomotor to the machine while the power is turned OFF.
4
Turn ON the power to the machine (host controller) and then check that the SERVO-
PACK is servo OFF status. Chec
k again that the protective function in step 1 operates
normally.
Note: For steps 4 to 8, take advance measures
for emergency stop so that the servo-
motor can stop safely when an error occurs during operation.
5.2.6 Stopping Servomo-
tors after /S-ON Turned
OFF or Alarm Occur-
rence
To host controller
To power
supply
CN1
CN8