www.dadehpardazan.ir 88594014-15
5 Operation
5.4.5 Smoothing
5-46
5.4.5 Smoothing
Applying a filter to a reference pulse input, this function provides smooth servomotor operation in the follow-
ing cases.
• When the host controller that outputs a reference cannot p
erform acceleration/deceleration processing.
• When the reference pulse frequency is too low.
Note: This function does not affect the travel distance (i.e., the number of reference pulses).
Related Parameters
Set the following filter-related parameters.
Change the setting while there is no reference pulse input and the servomotor stops.
When set to 0, a filter becomes ineffective.
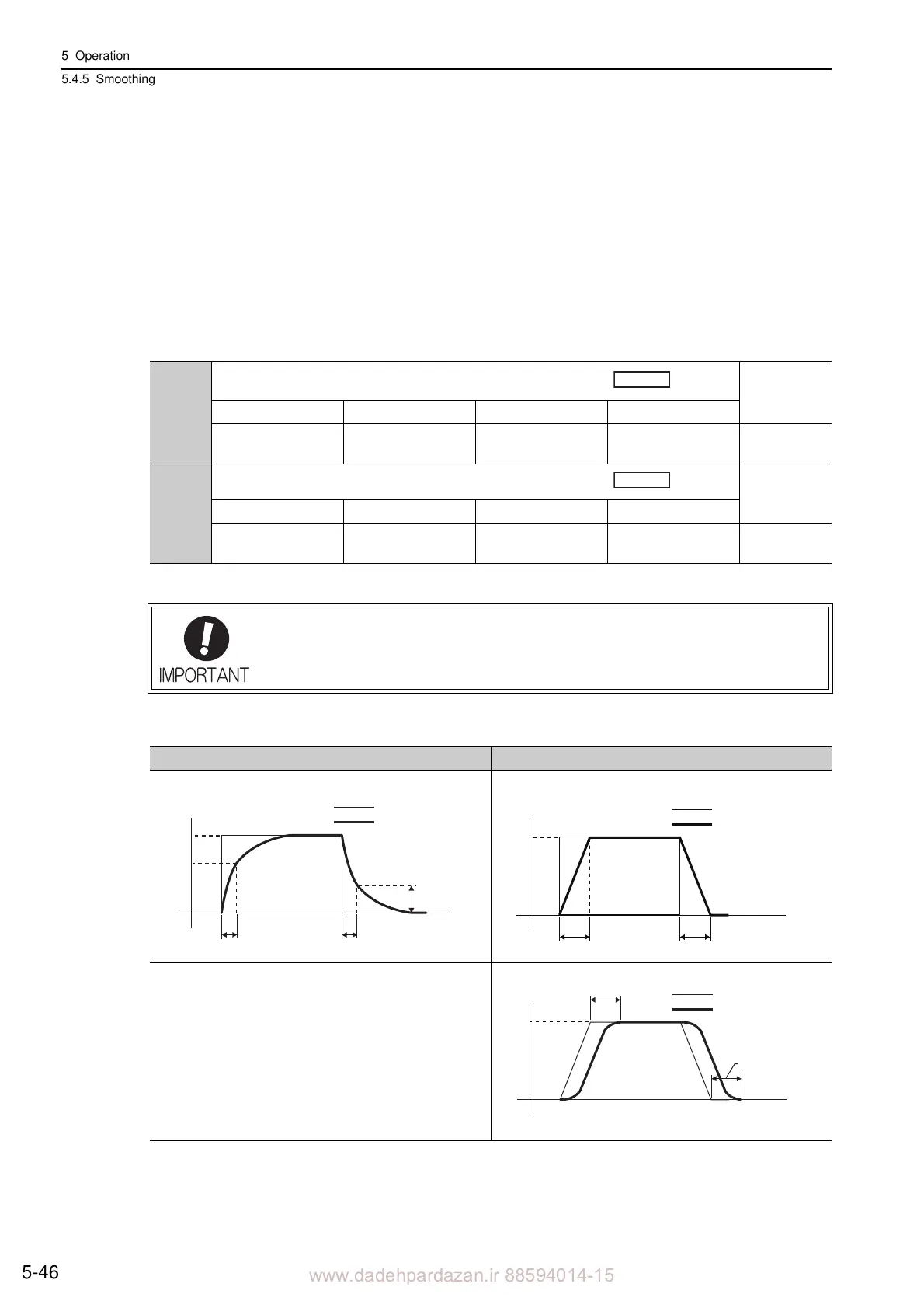
Note: The difference between the position reference acceleration/deceleration time constant (Pn216) and the average
movement time of position reference (Pn217) is shown below.
Pn216
Position Reference Acceleration/Deceleration Time
Const
ant
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 65535 0.1 ms
0
*
Immediately after the
servomotor stops
Setup
Pn217
Average Movement Time of Position Reference
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 10000 0.1 ms
0
*
Immediately after the
servomotor stops
Setup
While the servomotor is moving, changes in Pn216 or Pn217 will not be reflected. The
chang
es will be effective after the servomotor comes to a stop with no reference pulse
input.
Acceleration/Deceleration Filter (Pn216) Average Movement Time Filter (Pn217)
Position
Position
100%
63.2%
36.8%
Pn216 Pn216
Re
erence pulse
frequency
Before filter applied
After filter applied
Time
100%
Pn217
Pn217
Before filter applied
After filter applied
Time
Reference pulse
frequency
Pn217
Pn217
100%
Before filter applied
After filter applied
Time
Reference pulse
frequency

 Loading...
Loading...





