www.dadehpardazan.ir 88594014-15
9 Troubleshooting
9-26
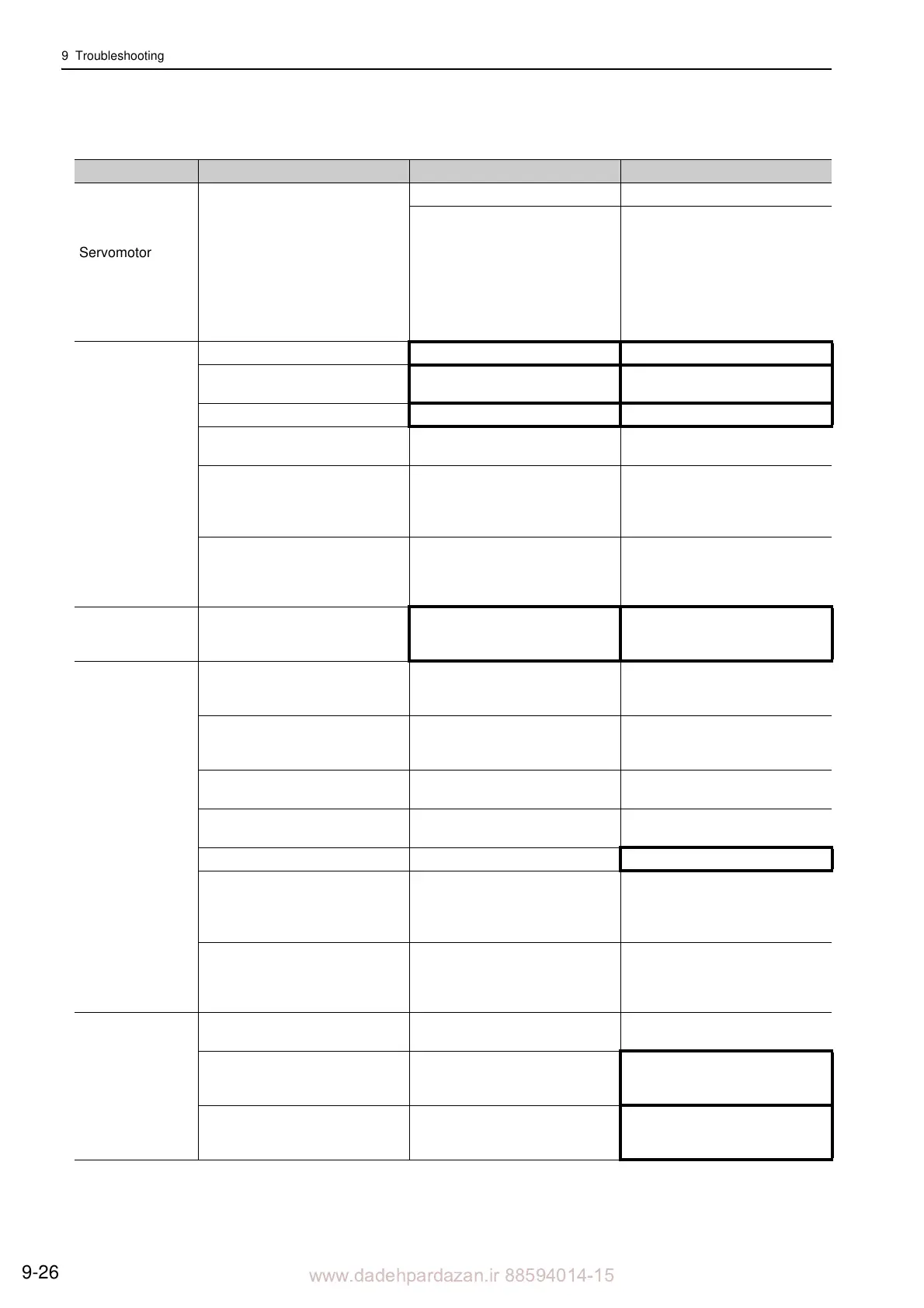
Servomotor Does
Not Start (cont’d)
The polarity detection is not exe-
cuted.
Check the parameter Pn080.0. Correct the setting of Pn080.0.
Check the /S-ON or /P-DET input
signal.
• When using an incremental linear
sc
ale, turn ON the /S-ON or /P-
DET input signal.
• When using an absolute linear
s
cale, turn OFF the external /S-
ON input signal and execute
Fn080.
Servomotor
Moves
Instanta-
neously,
and then
Stops
Servomotor wiring is incorrect. Check the wiring. Correct the wiring.
Serial converter unit wiring is incor-
rect.
Check the wiring. Correct the wiring.
Linear scale wiring is incorrect. Check the wiring.
Correct the wiring.
Linear scale pitch (Pn282) is incor-
rect.
Check the setting of Pn282. Correct the setting of Pn282.
Linear scale counting up direction
and servomotor coil assembly for-
ward direction do not agree.
Check the directions.
Change the setting of Pn080.1
(Motor Phase Selection).
Match the linear scale direction and
coil assembly direction.
Polarity detection is not performed
correctly.
Check if the value of Un004 (elec-
trical angle 2 from polarity origin)
at an ar
bitrary position is between
10 degrees.
Correct the settings for the polarity
detection related parameter.
Servomotor
S
peed Unstable
Wiring connection to servomotor is
defective.
Check connections of power
line
(phases U, V, and W) and serial
converter unit connectors.
Tighten any loose terminals or con-
nectors and correct the wiring.
Servomotor
Moves W
ithout
Reference Input
Speed control: Speed reference
input is
incorrect.
Check V-REF and SG to confirm if
the control method an
d the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Force control: Force refer
ence input
is incorrect.
Check V-REF and SG to confirm if
the control method and the input are
agreed.
Correct the control method selec-
tion parameter, and the input signal.
Speed reference offset is incorrect.
The SERVOPACK offset is
adj
usted incorrectly.
Adjust the SERVOPACK offset.
Position control: Reference p
ulse
input is incorrect.
Check the reference pulse form
(Pn200.0) and sign + pulse signal.
Correct the control method selec-
tion parameter, and the input signal.
A SERVOPACK fault occurred. Replace the SERVOPACK.
Linear scale counting up direction
and servomo
tor coil assembly for-
ward direction do not agree.
Check the directions.
Change the setting of Pn080.1
(Motor Ph
ase Selection).
Match the linear scale d
irection and
servomotor direction.
Polarity detection is not performed
corre
ctly.
Check if the value of Un004 (elec-
trical angle 2 from polarity origin)
at an arbitrary position is between
10 degrees.
Correct the settings for the polarity
detection related par
ameter.
Dynamic Brake
Doe
s Not Operate
Improper Pn001.0 setting
Check the setting for parameter
Pn001.0.
Correct the setting for parameter
Pn00
1.0.
DB resistor disconnected
Check if excessive mass, motor
ov
erspeed, or DB frequently acti-
vated occurred.
Replace the SERVOPACK, and
reduc
e the load.
DB drive circuit fault
There is a defective component in
the
DB circuit. Replace the SER-
VOPACK.
(cont’d)
Problem Probable Cause Investigative Actions Corrective Actions

 Loading...
Loading...





