5.5 Fault Detection
218 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
Cause Possible Solution
Overshoot or undershoot is
occurring.
• Adjust the gain by using the pulse train input parameters
(H6-02 through H6-05).
• Increase the settings for C5-01 (Speed Control Proportional Gain 1) and
reduce C5-02 (Speed Control Integral Time 1).
Incorrect PG pulse settings.
Set the H6-02 (Pulse Train Input Scaling) = 100%, the number of pulses during
maximum motor revolutions.
Inappropriate parameter settings.
Check the setting for the overspeed detection level and the overspeed detection
time (F1-08 and F1-09).
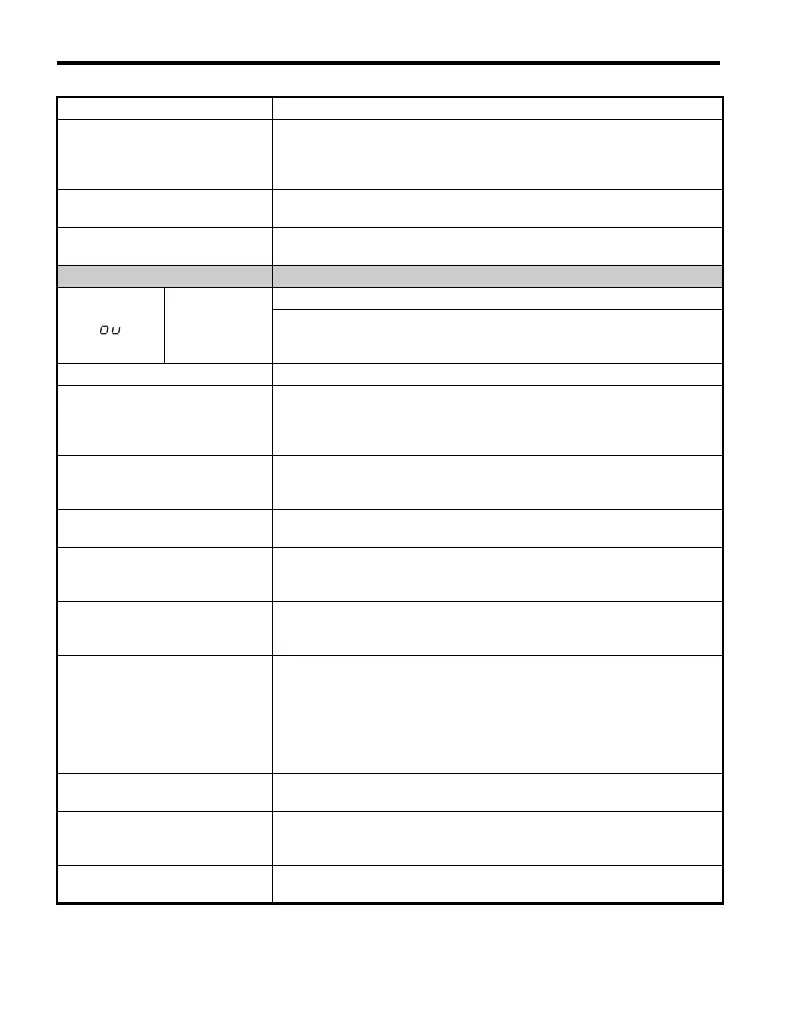
LED Operator Display Fault Name
ov
Overvoltage
Voltage in the DC bus has exceeded the overvoltage detection level.
For 200 V class: approximately 410 V
For 400 V class: approximately 820 V (740 V when E1-01 is less than 400)
Cause Possible Solution
Deceleration time is too short and
regenerative energy flows from the
motor into the drive.
• Increase the deceleration time (C1-02, -04, -06, -08).
• Install a braking resistor or a dynamic braking resistor unit.
• Enable stall prevention during deceleration (L3-04 = “1”). Stall prevention is
enabled as the default setting.
Acceleration time is too short.
• Check if sudden drive acceleration triggers an overvoltage alarm.
• Increase the acceleration time.
• Use longer S-curve acceleration and deceleration times.
Excessive braking load.
The braking torque was too high, causing regenerative energy to charge the DC
bus. Reduce the braking torque, use a braking option, or lengthen decel time.
Surge voltage entering from the
drive input power.
Install a DC reactor. Note: Voltage surge can result from a thyristor convertor
and a phase advancing capacitor operating on the same drive main input power
supply.
Ground fault in the output circuit
causing the DC bus capacitor to
overcharge.
• Check the motor wiring for ground faults.
• Correct grounding shorts and turn the power back on.
Speed Search related parameters are
not set properly.
(Includes Speed Search after a
momentary power loss and after a
fault restart.)
• Check the settings for Speed Search related parameters.
• Enable the Speed Search Retry function
• (b3-19 is greater than or equal to 1 to 10).
• Adjust the current level during Speed Search and the deceleration time (b3-02
and b3-03 respectively).
• Perform Line-to-Line Resistance Auto-Tuning and then enable Speed
Estimation Type Speed Search (b3-24 = “1”).
Excessive regeneration when
overshoot occurs after acceleration.
• Enable the Overvoltage Suppression function (L3-11 = “1”).
Lengthen the S curve at acceleration end.
Drive input power voltage is too
high.
• Check the voltage.
• Lower the voltage of the drive input power to within the limits listed in the
specifications.
The dynamic braking transistor is
damaged.
Replace the drive.

 Loading...
Loading...










