5.10 Detailed Troubleshooting
254 YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07)
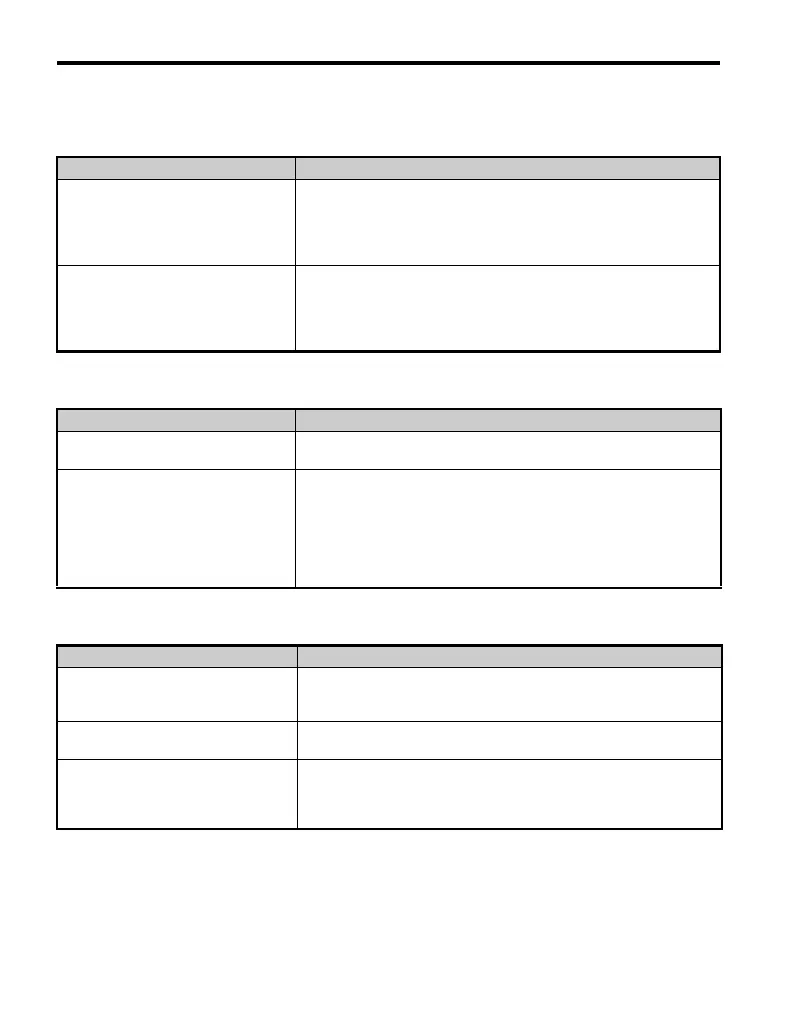
■ Drive Frequency Reference Differs from the Controller Frequency
Reference Command
■ Poor Speed Control Accuracy
■ Deceleration Takes Too Long With Dynamic Braking Enabled
Cause Possible Solutions
The analog input frequency gain and bias
are set to incorrect values.
• Check the frequency reference terminal input gain level assigned to
terminals A1 and A2, as well as the frequency reference input bias to
terminal A1 (parameters H3-03, H3-04 and H3-11).
• The settings mentioned above are added to the frequency reference.
• Set these parameters to the appropriate values.
A frequency bias signal is being entered
via analog input terminals A1 or A2.
• If multi-function analog input terminals A1 and A2 are set for frequency
reference (H3-02 = 0 and H3-10 = 0), the addition of both signals builds
the frequency reference.
• Ensure that H3-02 and H3-10 are set appropriately.
• Check the input level set for terminals A1 and A2.
Cause Possible Solutions
Drive has reached the slip compensation
limit.
• Check the slip compensation limit (C3-03).
• Increase the value set to C3-03.
Motor-rated voltage is set too high in
Open Loop Vector Control.
• The input voltage for the drive determines the maximum output voltage.
A drive with an input of 200 Vac can only output a maximum of 200 Vac.
Open Loop Vector Control sometimes calculates an output voltage
reference value that exceeds the maximum drive output voltage level,
resulting in a loss of speed control accuracy.
• Use a motor with a lower voltage rating (a vector control motor).
• Increase the input power voltage.
Cause Possible Solutions
L3-04 is set incorrectly.
• Check the Stall Prevention Level during deceleration (L3-04).
• If a braking resistor option has been installed, disable Stall Prevention
during deceleration (L3-04 = “0”).
The deceleration time is set too long.
Set the deceleration to a more appropriate time (C1-02, C1-04, C1-06,
C1-08).
Insufficient motor torque.
• Assuming parameter settings are normal and that no overvoltage occurs
when there is insufficient torque, it is likely that the demand on the motor
has exceeded the motor capacity.
• Use a larger motor.

 Loading...
Loading...










